一 : 唯有苹果能挑战索尼手机就剩工业设计了
日前,索尼在北京举办发布会,发布了新旗舰Xperia Z5和的Xperia Z5 Premium(Z5尊享版),目前这款索尼新旗舰Xperia Z5 Premium已经在天猫索尼手机旗舰店开始预约,并被命名为Xperia Z5尊享版,在笔者看来,Z5P这款手机的亮点在于,其售价为5699元。
从2013年开始,索尼已经发布了五款Xperia Z系列旗舰手机,这五代的产品特征都非常相似:整机棱角分明,电池续航优秀,拥有最新的高通处理器以及优秀的相机传感器。新机Xperia Z5和Z5 Compact也展示了其在摄像头与电池续航、防水等方面的功能优势,并采用了无边框设计以及4K显示屏。
在配置方面也符合旗舰的水准,2K屏幕搭载骁龙820处理器,拥有4GB RAM+32GB ROM存储组合,但核心短板问题一直存在,Z5和Z5 Compact依然没有解决索尼顾硬不顾软的旧问题。
我们知道,如果说索尼在工业设计方面依然值得夸耀的话,但在软件生态布局与应用体验方面却长期掣肘索尼的步伐,在中高端市场,此前索尼Xperia系列智能手机软件设计让手机操作颇为繁琐,UI设计缺乏统一风格,核心的特色功能与应用缺乏,导致其智能机在软件应用方面被广被诟病。
目前Xperia Z5在系统体验上再次延续了索尼的短板。日前美国科技媒体网站The Verge指出,Xperia Z5 像是一部无家可归的手机,并指出,该手机系统时有卡顿,背面玻璃易碎,指纹识别体验不稳定,屏幕显示一般。给出的评分是7.2分。
虽然去年谷歌发布了“黄油”计划,用来解决安卓系统卡顿问题。但索尼确并未达成谷歌对Android厂商的期望。国内某门户网站的评测也表达了类似的观点:“Z5 和Z5 Compact的一致性体现在系统。
索尼这两款手机出厂没有预装安卓6.0,而是Android5.1。虽然安卓系统发展非常成熟,5.1和6.0应该不会有太大差别。但在搭载最高规格硬件的Z5还是出现了过场动画不畅、应用加载缓慢的问题。”
不过话说回来,索尼并非没有认识到自身软件系统方面的短板所在,而是在很早之前就认识到软硬一体化的重要性。早在出井伸之时代,索尼就提出要用网络把消费电子产品和高新技术结合起来,进而带来高附加值。
在斯金格时代,索尼就计划将自身转型为一家涵盖内容以及网络业务上的娱乐公司,推动硬件与软件融合,但问题在于索尼基因所限以及索尼软硬件融合过程中,部门内部产生主导权之争,导致软硬件融合失败,加之索尼在斯金格时代轻视硬件价值,导致内耗以及技术人才流失。
使得软件与硬件两边都没有做出高品质的产品,融合失败之余,众多硬件产品也变得平庸,比如当平板电视实现了产业化,索尼产品却没有掌握其核心技术,结果陷入了价格战,液晶电视方面已落后于三星以及LG等竞争对手,移动业务走进了泥潭,索尼的产品从耳机、游戏机、医疗打印机、家用录像机、电视机和相机到手机等,有2000多款,但多数产品缺乏真正的核心竞争力,也难以形成协同与互补。
因此,技术上的退步也是索尼衰落的重要原因,自此后iPhone在日本攻城略地,平庸的索尼手机其品牌价值与销量一路下滑。
从2009年开始,亏损、业务调整、裁员、出售业务资产和物业这些关键词一直伴随索尼一路走来,公开资料显示,过去几年,索尼已经出现6个财年的亏损状况,有数据显示其6年亏了1.15万亿。Communities Dominate Brands公布了2015年第一季度全球智能手机市场报告,在排名前十的手机品牌中,中国厂商占有七席,索尼手机早已在TOP10之外,甚至销量已经被微软Lumia赶超。
索尼最新财报显示,传感器与PS4销售强劲,Xperia智能手机业务又是索尼唯一一项亏损的业务,该部门第二财季营业亏损206亿日元(约合1.72亿美元),营收为2792亿日元(约合23.3亿美元),智能手机业务在去年减记1760亿日元后仍在继续在索尼身上抽血。
对于年复一年拖后腿亏损不断的手机业务而言,索尼移动CEO Hiroki Totoki表示决不退出手机业务,“因为那是未来连接一切的终端。因为芯片,零部件等供应链趋于成熟,现在有很多新兴的公司都可以参与进来,这极大地加剧了竞争。但是这也是一个好消息,我们可以用技术优势来从同质化的产品中脱颖而出。”
但索尼却并未认识到其手机亏损不断事实上也是因为其已经丧失了技术优势,索尼Z5带来的防水这种黑科技在智能机时代并不具备核心竞争力。索尼硬件缺乏三星横向一体化垂直产业链优势,前面也提到索尼软硬件融合失败。
在软件上,相比国产手机的定制系统的稳定性与UI优化都尚且不及,更不用说苹果以iOS系统为支撑的软件生态相比。平庸之余,索尼带给人的印象是智能机的外壳,包裹着功能机时代的落后痕迹。索尼Z5在软件优化不给力之外,硬件问题也频频发生。
有用户抱怨索尼Z5在录制4K视频的时候会明显发热而导致相机关闭。国外用户Henley Bailey在YouTube上传了索尼Z5的测试视频时表示,在录制1080p视频的时候,不到三分钟,索尼Z5机身温度就已经达到了47度,随即相机软件就强制关闭了。因此,如果说“情怀”可以支撑品牌溢价,黑莓显然更有优势。
但索尼显然并未意识到优势丧失殆尽之后其手机品牌已经在持续跌落,索尼已经缺乏支撑起高价的品牌基础。我们看到索尼从2012年到2014年不断推出4000元左右新的旗舰机型,比如Z、Z1、Z2、Z3等旗舰,然后不断调高预期,亏损后再降价。
如今,索尼还是那个索尼,索尼在IFA2015展会上发布Z5、Z5 Compact、Z5 Premium三部手机之后,当天索尼英国官网就公布了三款手机的售价,让人们惊叹于索尼的自信,其售价分别高达599英镑(5853元人民币)、549英镑(5364元人民币)和699(6830元人民币)英镑。但不久后索尼英国官网就对价格作出了调整,Z5、Z5 Compact、Z5 Premium标明的售价分别是549英镑、429英镑、629英镑(约合人民币5300、4150、6080元)。
我们看到,索尼卖手机的定价策略依然充满着投机思维,在软硬件产品缺乏核心优势的前提下,既不懂定价策略对销量推动的重要性,也无法放下身段,索尼表示不追求销售量而是重视盈利,但品牌实力是最基本的要件,而索尼却对自身的品牌高度缺乏基本的认知。
在中国,索尼作为国外品牌,推动品牌本土化落地非常重要。即便是苹果,库克少不了也要隔山差五跑来中国,加大苹果商店的推进,解决政策壁垒,加码投资,公益商务两手抓。而索尼在中国,则现有即没有粉丝营销策略,也几乎很少看到其品牌落地与宣传,所以说,索尼也几乎缺乏品牌张力来支撑其高溢价。
在目前来看,索尼的手机业务先别说是否承担复苏之责,若能不亏损已是很大的成就。对于索尼来说,眼前最重要的不是昂着高贵的头颅卖高价,而是需要考虑,手机若持续亏损,是否会丧失出售的最佳时机。这虽然对于索尼暂时难以接受,但恐怕会是最终的结果。
索尼日前提出要把移动业务的管理架构以及产品架构变得更精简,从而提升资产回报率。但这并没有抓住核心问题,索尼没有把产品需求放到一个更大的背景下来衡量,确定产品以及它的价值主张是什么,对潜在需求的高估以及对产品与品牌局限性的低估。
对于索尼来说,需要对于手机产品进行重新定位并重新规划品牌。在整体的市场竞争程度在放大的情况下,索尼需要意识到自身的手机业务作为一个持续亏损的品牌根本不具备高溢价的能力,不然会陷入到一种自欺欺人的高端意淫的情境中不能自拔,继而陷入持续亏损的泥潭之中。
目前来看,亮点缺乏的Z5手机并未突破索尼手机的局限性,软硬件短板问题依然存在,也没有带来全新的创新亮点与技术,很显然,在高端市场要与苹果叫板的索尼Z5很可能又是一款将索尼移动业务持续拖向亏损深渊的产品。索尼手机目前的局势,跟HTC面临的局面没有太大的差别甚至还要糟糕,出售或者关闭该项业务或是止损的最好选择。

二 : 工业机械手设计
目录
摘要 ............................................................................................................................. 3
第一章 引言 ............................................................................................................ 4
1.1. 工业机械手设计的目的................................................................................. 4
1.2.机械手的设计方案........................................................................................... 4
1.2.1. 机械手大臂的设计要求....................................................................... 4
1.2.2运动方案................................................................................................. 4
1.2.3设计内容................................................................................................. 5
1.2.4 执行机构................................................................................................ 5
1.2.5运动机构................................................................................................. 6
1.3 机械手腰座结构的设计.................................................................................. 7
1.3.1 机械手腰座结构的设计要求................................................................. 7
1.3.2 设计具体采用方案................................................................................ 8
1.4 工业机械手的概述.......................................................................................... 9
1.5 机械手腕部的结构设计.................................................................................. 9
第二章 系统工作工程 ...................................................................................... 12
2.1 系统的介绍.................................................................................................... 12
2.2 出货过程........................................................................................................ 12
2.3 进货过程........................................................................................................ 12
第三章 系统设计思想 ...................................................................................... 12
3.1步进控制电路设计思想................................................................................. 12
3.2系统构成......................................................................................................... 14
3.3 PLC 软件系统设计的步骤 ........................................................................... 15
第四章 PLC机械手的形式............................................................................ 16
4.1 两手呈180°的回转式单臂双手机械手;................................................. 16
4.2 两手互相垂直的回转式单臂双手机械手.................................................... 16
4.3 机械手传送系统梯形图................................................................................ 17
4.4 指令语句表.................................................................................................... 19
4.5机械手末端执行器(手爪)的结构设计..................................................... 20
第五章 液压传动系统设计.......................................................................... 22
5.1液压传动系统设计计算................................................................................. 22
5.1.1确定液压系统基本方案....................................................................... 22
5.1.2拟定液压执行元件运动控制回路....................................................... 23
5.1.3液压源系统的设计............................................................................... 23
5.1.4绘制液压系统图................................................................................... 24
第六章 零件图工艺分析............................................................................... 25
陕西航空职业技术学院毕业论文
6.1数控铣削加工................................................................................................. 25
6.3平面凸轮的数控铣削工艺分析..................................................................... 29 结束语....................................................................................................................... 34 致谢............................................................................................................................ 35 参考文献.................................................................................................................. 36
2
陕西航空职业技术学院毕业论文
摘要
工业机械手是在生产过程中采用机电结合来模拟人手动作的机械设备,它可以代替人手搬运笨重物体或在高温、有毒、高粉尘,易燃易爆、单调和放射性等恶劣的环境下工作。机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。机械手越来越广泛的得到了应用,在机械行业中它可用于零部件组装 ,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,它适应于中、小批量生产,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。当工件变更时,柔性生产系统很容易改变,有利于企业不断更新适销对路的品种,提高产品质量,更好地适应市场竞争的需要。而目前我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计是非常有意义的。
3
陕西航空职业技术学院毕业论文
第一章 引言
1.1. 工业机械手设计的目的
机械设计制造及其自动化专业是为了培养从事机械设计、制造行业的人才而开设的专业。而工业机械手课程设计不仅培养设计者对机械的认识、运用能力而且也增进了对机械工业发展的了解和认知。
工业机械手的设计涉及:机械设计原理、液压、气压、电气传动及单片机、PLC、可编程控制器等控制系统与基本理论知识。
设计目的:
1、 培养学生的机械设计能力;
2、 扩展学生的知识结构;
3、 帮助学生培养综合运用能力;
4、 是课堂教学的有益补充。
1.2.机械手的设计方案
1.2.1. 机械手大臂的设计要求
l、行程:0—500mm,任意可凋。
2、运动时间:0—5S
3、运动平稳,定位可靠、精确。
4、结构设计时考虑伸缩臂原位时的整机平衡。
5、与旋转机座、伸缩臂为法兰联接。
6、采用燕尾滑动导轨,铸造毛坯。
1.2.2运动方案
C1 液压驱动方案
采用直线油缸。考虑手臂最低工位,推荐采用上图所示变行程措施。
4
陕西航空职业技术学院毕业论文
C2 机械驱动方案
采用滚珠丝杠传动。考虑伸缩臂等惯性力作用对定位的影响。
1.2.3设计内容
方案C1
l、大臂结构设计;
2、大臂结构强度计算;
3、驱动系统液压油流量、压力、驱动油缸的选择;
4、齿轮强度。
5、成果要求:画大臂部件装配图1张,大臂零件图1张
方案C2
1、大臂结构设计;
2、大臂结构强度计算;
3、传动系统设计:电机选择、丝杠选择(公称直径、导程);
4、丝杠强度计算;
5、成果要求:画大臂部件装配图1张、丝杠零件图1张。
1.2.4 执行机构
包括手部、手腕、手臂和立柱等部件,有的还增设行走机构。
1、手部 即与物件接触的部件。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
2、手腕 是联接手部和手臂的部件,其调整或改变工件方位的作用。
3、手臂 支承手腕和手部的部件,用以改变工件的空间位置。
4、立柱 是支承手臂的部件,立柱也可以是手臂的一部分,手臂的回转运动和升降(或俯仰)运动均与立柱有密切的联系。
5
陕西航空职业技术学院毕业论文
5、行走机构 机械手为了完成远距离的操作和扩大使用范围,可以增设滚轮行走机构。滚轮式行走机构可分为有轨的或是无轨的两种。
6、机座 它是机械手的基础部分,机械手执行机构的各部件和驱动系统均安装于基座上,故起支承和联接的作用。
7、其它部分 行程检测装置和传感装置等。
行程检测装置是检测和控制机械手各运动行程(位置)的装置。
传感装置其中装有某种传感器,使手指具有敏感性和自控性,用以反映手指与物件是否接触、物件有无滑下或脱落、物件的位置是否准确、手指对物件的握紧力是否与物件的重量相适应。
1.2.5运动机构
1.直角坐标机器人结构
直角坐标机器人的空间运动是用三个相互垂直的直线运动来实现的,如图1-1.a。由于直线运动易于实现全闭环的位置控制,所以,直角坐标机器人有可能达到很高的位置精度(μm级)。但是,这种直角坐标机器人的运动空间相对机器人的结构尺寸来讲,是比较小的。因此,为了实现一定的运动空间,直角坐标机器人的结构尺寸要比其他类型的机器人的结构尺寸大得多。
直角坐标机器人的工作空间为一空间长方体。直角坐标机器人主要用于装配作业及搬运作业,直角坐标机器人有悬臂式,龙门式,天车式三种结构。
2.圆柱坐标机器人结构
圆柱坐标机器人的空间运动是用一个回转运动及两个直线运动来实现的,如图1-1.b。这种机器人构造比较简单,精度还可以,常用于搬运作业。其工作空间是一个圆柱状的空间。
3. 球坐标机器人结构
球坐标机器人的空间运动是由两个回转运动和一个直线运动来实现的,如图1-1.c。这种机器人结构简单、成本较低,但精度不很高。主要应用于搬运作业。其工作空间是一个类球形的空间。
6
陕西航空职业技术学院毕业论文
4. 关节型机器人结构
关节型机器人的空间运动是由三个回转运动实现的,如图1-1.d。关节型机器人动作灵活,结构紧凑,占地面积小。相对机器人本体尺寸,其工作空间比较大。此种机器人在工业中应用十分广泛,如焊接、喷漆、搬运、装配等作业,都广泛采用这种类型的机器人。
关节型机器人结构,有水平关节型和垂直关节型两种。

图1-1 四种机器人坐标形式
1.3 机械手腰座结构的设计
进行了机械手的总体设计后,就要针对机械手的腰部、手臂、手腕、末端执行器等各个部分进行详细设计。
1.3.1 机械手腰座结构的设计要求
工业机器人腰座,就是圆柱坐标机器人,球坐标机器人及关节型机器人的回转基座。它是机器人的第一个回转关节,机器人的运动部分全部安装在腰座上,它承受了机器人的全部重量。在设计机器人腰座结构时,要注意以下设计原则:
1.腰座要有足够大的安装基面,以保证机器人在工作时整体安装的稳定性。
2.腰座要承受机器人全部的重量和载荷,因此,机器人的基座和腰部轴及轴承的结构要有足够大的强度和刚度,以保证其承载能力。
3.机器人的腰座是机器人的第一个回转关节,它对机器人末端的运动精度影响最大,因此,在设计时要特别注意腰部轴系及传动链的精度与刚度的保证。
4.腰部的回转运动要有相应的驱动装置,它包括驱动器(电动、液压及气动)及减速器。驱动装置一般都带有速度与位置传感器,以及制动器。 7
陕西航空职业技术学院毕业论文
5.腰部结构要便于安装、调整。腰部与机器人手臂的联结要有可靠的定位基准面,以保证各关节的相互位置精度。要设有调整机构,用来调整腰部轴承间隙及减速器的传动间隙。
6.为了减轻机器人运动部分的惯量,提高机器人的控制精度,一般腰部回转运动部分的壳体是由比重较小的铝合金材料制成,而不运动的基座是用铸铁或铸钢材料制成。
1.3.2 设计具体采用方案
腰座回转的驱动形式要么是电机通过减速机构来实现,要么是通过摆动液压缸或液压马达来实现,目前的趋势是用前者。因为电动方式控制的精度能够很高,而且结构紧凑,不用设计另外的液压系统及其辅助元件。考虑到腰座是机器人的第一个回转关节,对机械手的最终精度影响大,故采用电机驱动来实现腰部的回转运动。一般电机都不能直接驱动,考虑到转速以及扭矩的具体要求,采用大传动比的齿轮传动系统进行减速和扭矩的放大。因为齿轮传动存在着齿侧间隙,影响传动精度,故采用一级齿轮传动,采用大的传动比(大于100),同时为了减小机械手的整体结构,齿轮采用高强度、高硬度的材料,高精度加工制造,尽量减小因齿轮传动造成的误差。腰座具体结构如图1-2所示:

图1-2 腰座结构图
8
陕西航空职业技术学院毕业论文
1.4 工业机械手的概述
机械手是在机械化、自动化生产过程中发展起来的一种新型装置。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用,例如:
1.机床加工工件的装卸,特别是在自动化车床、组合机床上使用较为普遍。
2.在装配作业中应用广泛,在电子行业中它可以用来装配印制电路板,在机械行业中
它可以用来组装零部件。
3.可在劳动条件差,单调重复易子疲劳的工作环境工作,以代替人的劳动。
4.可在危险场合下工作,如军工品的装卸、危险品及有害物的搬运等。
5.宇宙及海
1.5 机械手腕部的结构设计
机器人的手臂运动(包括腰座的回转运动),给出了机器人末端执行器在其工作空间中的运动位置,而安装在机器人手臂末端的手腕,则给出了机器人末端执行器在其工作空间中的运动姿态。机器人手腕是机器人操作机的最末端,它与机器人手臂配合运动,实现安装在手腕上的末端执行器的空间运动轨迹与运动姿态,完成所需要的作业动作。
1.机器人手腕的自由度数,应根据作业需要来设计。机器人手腕自由度数目愈多,各关节的运动角度愈大,则机器人腕部的灵活性愈高,机器人对对作业的适应能力也愈强。但是,自由度的增加,也必然会使腕部结构更复杂,机器人的控制更困难,成本也会增加。因此,手腕的自由度数,应根据实际作业要求来确定。在满足作业要求的前提下,应使自由度数尽可能的少。一般的机器人手腕 9
陕西航空职业技术学院毕业论文
的自由度数为2至3个,有的需要更多的自由度,而有的机器人手腕不需要自由度,仅凭受臂和腰部的运动就能实现作业要求的任务。因此,要具体问题具体分析,考虑机器人的多种布局,运动方案,选择满足要求的最简单的方案。
2.机器人腕部安装在机器人手臂的末端,在设计机器人手腕时,应力求减少其重量和体积,结构力求紧凑。为了减轻机器人腕部的重量,腕部机构的驱动器采用分离传动。腕部驱动器一般安装在手臂上,而不采用直接驱动,并选用高强度的铝合金制造。
3.机器人手腕要与末端执行器相联,因此,要有标准的联接法兰,结构上要便于装卸末端执行器。
4.机器人的手腕机构要有足够的强度和刚度,以保证力与运动的传递。
5.要设有可靠的传动间隙调整机构,以减小空回间隙,提高传动精度。
6.手腕各关节轴转动要有限位开关,并设置硬限位,以防止超限造成机械损坏。
通过对数控机床上下料作业的具体分析,考虑数控机床加工的具体形式及对机械手上下料作业时的具体要求,在满足系统工艺要求的前提下提高安全和可靠性,为使机械手的结构尽量简单,降低控制的难度,本设计手腕不增加自由度,实践证明这是完全能满足作业要求的,3个自由度来实现机床的上下料完全足够。具体的手腕(手臂手爪联结梁)结构见图1-3。
水平液压缸支承板手臂手
爪联结
梁
执行手爪
图1-3手爪联结结构
10
陕西航空职业技术学院毕业论文
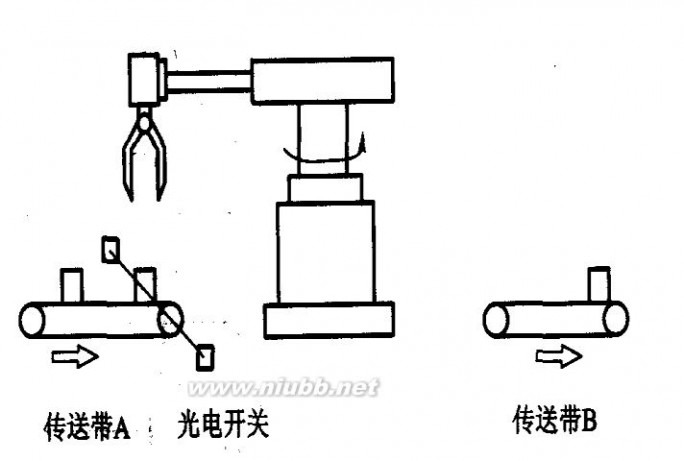
图1-4 机械手控制图
1.在传输带A端部,安装了光电开关PS,用以检测洋的开发。
2.机械手在原位时,按下起动按钮,系统起动,传送带A运转。当光电开关检测到物品后,传送带A停。
3.传输带A停止后,机械手进行一次循环动作,把物品从传送带A上搬到传送带B(连续运转)上。
4.机械手返回原位后,自动再起动传送带A运转,进行下一个循环。
5.按下停止按钮后,应等到整个循环完成后,才能使机械手返回原位,停止工作。
6.机械手的上升/下降和左移/右移的执行结构均采用双线圈的二位电磁阀驱动液压装置实现,每个线圈完成一个动作。
7.抓紧/放松由单线圈二位电磁阀驱动液压装置完成,线圈通电时执行抓紧动作,线圈断电时执行放松动作。
8.机械手的上升、下降、左移、右移动作均由极限开关控制。
9.抓紧动作由压力继电器控制,当抓紧时,压力继电器动合触点闭合。放松动作为时间控制(设为2s)。

11
陕西航空职业技术学院毕业论文
第二章 系统工作工程
2.1 系统的介绍
本系统的机械手部分由底盘、立杆、手臂、手组成,其中底盘由一个步进电机驱动,可顺逆时针旋转;立杆由一个步进电机驱动,可上下移动;手臂由一个步进电机驱动,可前后伸缩;手由气泵控制,可抓紧和放松。在相应位置都有位置检测信号用于定位。
2.2 出货过程
从复位位置启动,根据要求到相应出货台(1,2,3号货台),此时底盘转动到要求位置,立柱下降,手臂伸出,定位后手抓货物,立柱上升,同时手臂回收(以免运行中与其它设备相撞),然后到相应出货台(左,或右出货台),立柱下降,手臂伸出,手打开,把货物放在相应出货台上。
2.3 进货过程
从复位位置启动,根据要求到相应出货台(左,或右出货台),此时底盘转动到要求位置,立柱下降,手臂伸出,定位后手抓货物,立柱上升,同时手臂回收(以免运行中与其它设备相撞),然后到相应出货台(1,2,3号货台),立柱下降,手臂伸出,手打开,把货物放在相应出货台上。
12
陕西航空职业技术学院毕业论文
第三章 系统设计思想
3.1步进控制电路设计思想
PLC继电器式输出模块工作速度较低,故采用高频脉冲方波发生器,给出步进脉冲,其振荡频率按步进电机速度设置,步进量的控制采用位置检测,根据位置检测信号用PLC的输出点切断进给电机,实现步进电机的停车, 其程序流程图如图所示。
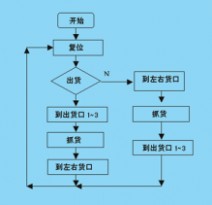
图1-4程序流程图
在整个机械手运行控制过程中,采用限位开关以及面板操作开关以及系统逻辑开关作为输入点,整个系统中底盘有5个限位开关,分别作为5个位置的定位输入点,立柱有4个限位开关,分别为1个复位开关、一号位限位输入量、上限位、下限位。手臂有3个限位开关:手臂复位限位数入点、手臂前限位、手臂后限位。抓手限位开关,为抓手复位输入点。一共13个限位开关完成全部的控制输入。各限位开关分布情况见图1,
由于在整个控制过程中全部是通过控制步进电机驱动模块再驱动步进电机执行。这里对用集成脉冲输出触发步进电机驱动器原理进行说明。S7-200 PLC(CPU 226)的Q0.0和Q0.1分别对升/降步进电机、前/后步进电机发送脉冲;CPU 226的Q0.2对转盘步进电机发送脉冲。而步进电机的正/反转则分别是 13
陕西航空职业技术学院毕业论文
CPU 226的Q0.4和Q0.5分别对升/降步进电机、前/后步进电机实行控制;CPU 226 的Q0.6和Q0.7分别对转盘步进电机正反、抓手气泵开关实行控制。
机械手PLC程序的设计编写采用了STEP 7-Micro/WIN32软件的数据表(STL)的形式。程序设计修改方便,设计完成可联机调试,没有问题再把步进电机接上。
上位机监控软件采用北京亚控的组态王软件,通过变量映射实现组态软件的变量与PLC的寄存器的动态连接,从而实现了上位机对PLC的监控。
3.2系统构成
(1)气动系统
该系统的气动件全部采用的是SMC公司的产品,共用了48个气缸,48个两位四通阀,2个真空发生器,其中检盖器由测长气缸制成,B箱输送机由1米长的无出杆气缸制成,其它所有机械手、转运机等均由普通气缸制成。
(2)传送系统
包括8个传送带和1个输送机,除输送机由无出杆气缸制成外,传送带均由步进电机驱动,共使用了8台步进电机。
(3)检测系统
包括96个行程开关、6个接近开关、5个碰撞开关和1个测长气缸。
(4)控制系统
该系统的全部控制功能由一台松下电工FP3型可编程控制器实现,用于控制步进电机的的脉冲单元8个,控制系统原理框图如图1-5所示。

图1-5控制系统原理框图
14
陕西航空职业技术学院毕业论文
3.3 PLC 软件系统设计的步骤
在了解了程序结构和编程方法的基础上,就要实际地编写 PLC 程序了。编写 PLC 程序和编写其他计算机程序一样,都需要经历如下过程。
1)对系统任务分块
分块的目的就是把一个复杂的工程,分解成多个比较简单的小任务。这样就把一个复杂的大问题化为多个简单的小问题。这样可便于编制程序。
2)编制控制系统的逻辑关系图
从逻辑关系图上,可以反应出某一逻辑关系的结果是什么,这一结果又英国导出哪些动作。这个逻辑关系可以是以各个控制活动顺序为基准,也可能是以整个活动的时间节拍为基准。逻辑关系图反映了控制过程中控制作用与被控对象的活动,也反应了输入与输出的关系。
3)绘制各种电路图
绘制各种电路的目的,是把系统的输入输出所设计的地址和名称联系起来。这是很关键的一步。在绘制 PLC 的输入电路时,不仅要考虑到信号的连接点是否与命名一致,还要考虑到输入端的电压和电流是否合适,也要考虑到在特殊条件下运行的可靠性与稳定条件等问题。特别要考虑到能否把高压引导到 PLC 的输入端,把高压引入 PLC 输入端,会对 PLC 造成比较大的伤害。在绘制 PLC 的输出电路时,不仅要考虑到输出信号的连接点是否与命名一致,还要考虑到 PLC 输出模块的带负载能力和耐电压能力。此外,还要考虑到电源的输出功率和极性问题。在整个电路的绘制中,还要考虑设计的原则努力提高其稳定性和可靠性。虽然用 PLC 进行控制方便、灵活。但是在电路的设计上仍然需要谨慎、全面。因此,在绘制电路图时要考虑周全,何处该装按钮,何处该装开关,都要一丝不苟。
15
陕西航空职业技术学院毕业论文
第四章 PLC机械手的形式
4.1 两手呈180°的回转式单臂双手机械手;

图1-6机械手臂和手爪
4.2 两手互相垂直的回转式单臂双手机械手
机械手是一种能模拟人的手臂的部分动作,按预定的程序、轨迹及其它要求,实现抓取、搬运工件或操纵工具的自动化装置;而可编程控制器(PLC)由于其具有的高可靠性、编程方便、易于使用和修改,易于扩展和维护,环境要求低、体积小巧,安装调试方便,在工业控制中有着广泛的应用。根据我们所设计的机械手的驱动部件为步进电机的特点,应用PLC移位寄存SFT指令可以很方便、灵活地对机械手进行控制。1 总体功能简介1.1 机械手的结构及运动机械手的结构主要由柱身、绕着柱身作360°正、反方向旋转的手臂、手臂的俯仰运动.
16
陕西航空职业技术学院毕业论文
图1-7两手互相垂直的回转式单臂双手机械手
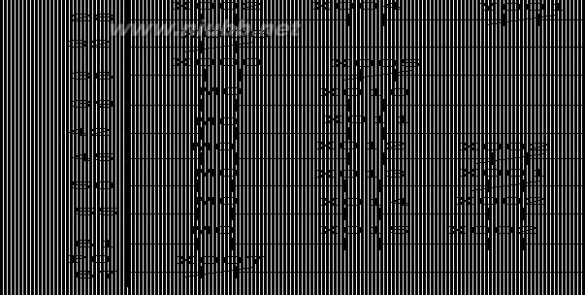
4.3 机械手传送系统梯形图
如图2-7。图中从第0行到第27行为回原位状态程序。从第28行到第66行,为手动单步操作程序。从第67行到第129行为自动操作程序。这三部分程序(又称为模块)是图3的操作系统运行的。
回原位程序和自动操作程序。是用步进顺控方式编程。在各步进顺控末行,都以RET结束本步进顺控程序块。但两者又有不同。回原位程序不能自动返回初始态S1。而自动操作程序能自动返回初态S2。

17
陕西航空职业技术学院毕业论文
图1-8传送梯形图
18

陕西航空职业技术学院毕业论文
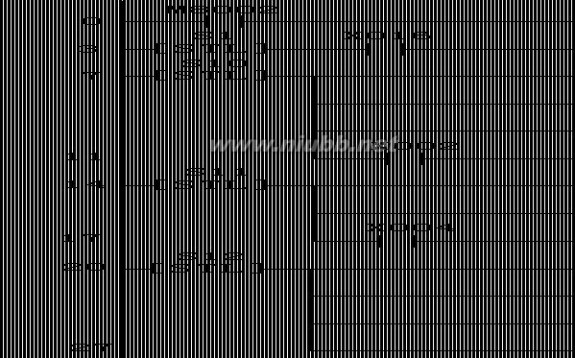
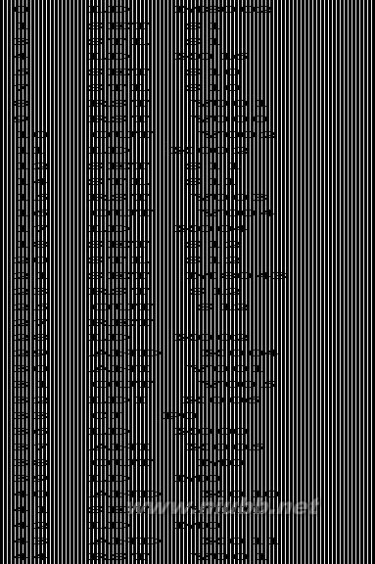
4.4 指令语句表

19
陕西航空职业技术学院毕业论文
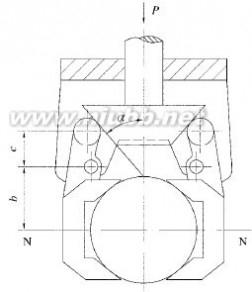
4.5机械手末端执行器(手爪)的结构设计
机器人末端执行器是安装在机器人手腕上用来进行某种操作或作业的附加装置。机器人末端执行器的种类很多,以适应机器人的不同作业及操作要求。末端执行器可分为搬运用、加工用和测量用等。
加工用末端执行器是带有喷枪、焊枪、砂轮、铣刀等加工工具的机器人附加装置,用来进行相应的加工作业。测量用末端执行器是装有测量头或传感器的附加装置,用来进行测量及检验作业。
在设计机器人末端执行器时,应注意以下问题;
1.机器人末端执行器是根据机器人作业要求来设计的。一个新的末端执行器的出现,就可以增加一种机器人新的应用场所。因此,根据作业的需要和人们的想象力而创造的新的机器人末端执行器,将不断的扩大机器人的应用领域。
2.机器人末端执行器的重量、被抓取物体的重量及操作力的总和机器人容许的负荷力。因此,要求机器人末端执行器体积小、重量轻、结构紧凑。
3.机器人末端执行器的万能性与专用性是矛盾的。万能末端执行器在结构上很复杂,甚至很难实现,例如,仿人的万能机器人灵巧手,至今尚未实用化。目前,能用于生产的还是那些结构简单、万能性不强的机器人末端执行器。从工业实际应用出发,应着重开发各种专用的、高效率的机器人末端执行器,加之以末端执行器的快速更换装置,以实现机器人多种作业功能,而不主张用一个万能的末端执行器去完成多种作业。因为这种万能的执行器的结构复杂且造价昂贵。
4.通用性和万能性是两个概念,万能性是指一机多能,而通用性是指有限的末端执行器,可适用于不同的机器人,这就要求末端执行器要有标准的机械接口(如法兰),使末端执行器实现标准化和积木化。
5.机器人末端执行器要便于安装和维修,易于实现计算机控制。用计算机控制最方便的是电气式执行机构。因此,工业机器人执行机构的主流是电气式,其次是液压式和气压式(在驱动接口中需要增加电-液或电-气变换环节)。
结合具体的工作情况,本设计采用连杆杠杆式的手爪。驱动活塞往复移动,通过活塞杆端部齿条,中间齿条及扇形齿条使手指张开或闭合。手指的最小开度 20
陕西航空职业技术学院毕业论文
由加工工件的直径来调定。本设计按照工件的直径为50mm来设计。手爪的具体结构形式如图2-5所示:
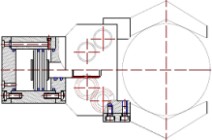
图2-5机械手末端执行手爪结构图
机器人是由多级联杆和关节组成的多自由度的空间运动机构。除直接驱动型机器人以外,机器人各联杆及各关节的运动都是由驱动器经过各种机械传动机构进行驱动的。机器人所采用的传动机构与一般机械的传动机构相类似。常用的机械传动机构主要有螺旋传动、齿轮传动、同步带传动、高速带传动等。由于传动部件直接影响着机器人的精度、稳定性和快速响应能力,因此,应设计和选择满足传动间隙小,精度高,低摩擦、体积小、重量轻、运动平稳、响应速度快、传递转矩大、谐振频率高以及与伺服电动机等其它环节的动态性能相匹配等要求的传动部件。
21
陕西航空职业技术学院毕业论文
第五章 液压传动系统设计
5.1液压传动系统设计计算
5.1.1确定液压系统基本方案
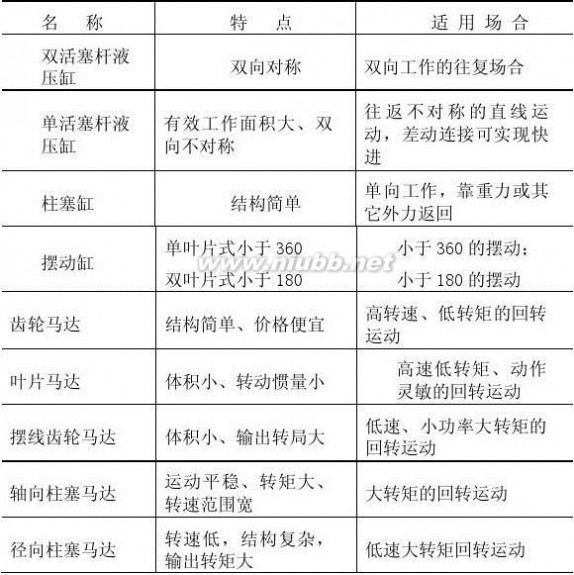
液压执行元件大体分为液压缸和液压马达,前者实现直线运动,后者实现回转运动。二者的特点及适用场合见表3-1:

本设计因为机械手的形式为圆柱坐标形式,具有3个自由度,一个转动,两个移动自由度。同时考虑机械手的工作载荷和工作现场环境对机械手布局以及
22
陕西航空职业技术学院毕业论文
定位精度的具体要求以及计算机的控制的因素,腰部的回转用电机驱动实现,剩下的两个运动均为直线运动。因此,机械手的水平手臂和垂直手臂都采用单活塞杆液压缸,来实现直线往复运动。
5.1.2拟定液压执行元件运动控制回路
液压执行元件确定后,其运动方向和运动速度的控制是液压回路的核心问题。
方向控制是用换向阀或是逻辑控制单元来实现。对于一般中小流量的液压系统,通过换向阀的有机组合来实现所要求的动作。对高压大流量的系统,多采用插装阀与先导控制阀的逻辑组合来实现。
速度控制通过改变液压执行元件输入或输出的流量或者利用密封空间的容积变化来实现。相应的调速方式有节流调速、容积调速以及二者结合的容积节流调速。
本设计的方向控制采用电磁换向阀来实现,而速度的控制主要采用节流调速,主要方式是采用比较简单的节流阀来实现。
5.1.3液压源系统的设计
液压系统的工作介质完全由液压源来提供,液压源的核心是液压泵。节流调速系统一般用定量泵供油,在无其他辅助油源的情况下,液压泵的供油量要大于系统的需油量,多余的油经溢流阀流回油箱,溢流阀同时起到控制并稳定油源压力的作用。容积调速系统多用变量泵供油,用安全阀来限定系统的最高压力。
油液的净化装置是液压源中不可缺的元件。一般泵的入口要装粗滤油器,进入系统的油液根据要求,通过精滤油器再次过滤。为防止系统中杂质流回油箱,可在回油路上设置磁过滤器。根据液压设备所处的环境及对温升的要求,还要考虑加热、冷却等措施。
本设计的液压系统采用定量泵供油,由溢流阀V1来调定系统压力。为了保证液压油的洁净,避免液压油带入污染物,故在油泵的入口安装粗过滤器,而在油泵的出口安装精过滤器对循环的液压油进行净化。
23
陕西航空职业技术学院毕业论文
5.1.4绘制液压系统图
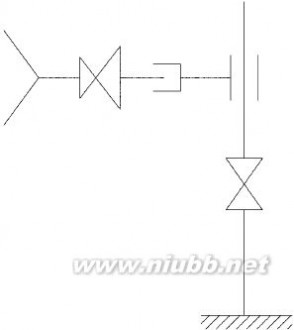
本机械手的液压系统图如图5-1所示,
它拥有垂直手臂的上升、下降,水平伸缩缸/的前伸、后缩,以及执行手爪的夹紧、张开三个执行机构。
其中,泵由三相交流异步电动机M拖动;系统压力由溢流阀V1调定;1DT的得失电决定了动力源的投入与摘除。
考虑到手爪的工作要求轻缓抓取、迅速松开,系统采用了节流效果不等的两个单向节流阀。当5DT得电时,工作液体经由节流阀V5进入柱塞缸,实现手爪的轻缓抓紧;当6DT失电时,工作液体进入柱塞缸中,实现手爪迅速松开。
另外,由于机械手垂直升降缸在工作时其下降方向与负荷重力作用方向一致,下降时有使运动速度加快的趋势,为使运动过程的平稳,同时尽量减小冲击、振动,保证系统的安全性,采用V2构成的平衡回路相升降油缸下腔提供一定的排油背压,以平衡重力负载。

图5-1 机械手的液压系统原理图
24
三 : 工业机械手设计
目录
摘要 ............................................................................................................................. 3
第一章 引言 ............................................................................................................ 4
1.1. 工业机械手设计的目的................................................................................. 4
1.2.机械手的设计方案........................................................................................... 4
1.2.1. 机械手大臂的设计要求....................................................................... 4
1.2.2运动方案................................................................................................. 4
1.2.3设计内容................................................................................................. 5
1.2.4 执行机构................................................................................................ 5
1.2.5运动机构................................................................................................. 6
1.3 机械手腰座结构的设计.................................................................................. 7
1.3.1 机械手腰座结构的设计要求................................................................. 7
1.3.2 设计具体采用方案................................................................................ 8
1.4 工业机械手的概述.......................................................................................... 9
1.5 机械手腕部的结构设计.................................................................................. 9
第二章 系统工作工程 ...................................................................................... 12
2.1 系统的介绍.................................................................................................... 12
2.2 出货过程........................................................................................................ 12
2.3 进货过程........................................................................................................ 12
第三章 系统设计思想 ...................................................................................... 12
3.1步进控制电路设计思想................................................................................. 12
3.2系统构成......................................................................................................... 14
3.3 PLC 软件系统设计的步骤 ........................................................................... 15
第四章 PLC机械手的形式............................................................................ 16
4.1 两手呈180°的回转式单臂双手机械手;................................................. 16
4.2 两手互相垂直的回转式单臂双手机械手.................................................... 16
4.3 机械手传送系统梯形图................................................................................ 17
4.4 指令语句表.................................................................................................... 19
4.5机械手末端执行器(手爪)的结构设计..................................................... 20
第五章 液压传动系统设计.......................................................................... 22
5.1液压传动系统设计计算................................................................................. 22
5.1.1确定液压系统基本方案....................................................................... 22
5.1.2拟定液压执行元件运动控制回路....................................................... 23
5.1.3液压源系统的设计............................................................................... 23
5.1.4绘制液压系统图................................................................................... 24
第六章 零件图工艺分析............................................................................... 25
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
6.1数控铣削加工................................................................................................. 25
6.3平面凸轮的数控铣削工艺分析..................................................................... 29 结束语....................................................................................................................... 34 致谢............................................................................................................................ 35 参考文献.................................................................................................................. 36
2
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
摘要
工业机械手是在生产过程中采用机电结合来模拟人手动作的机械设备,它可以代替人手搬运笨重物体或在高温、有毒、高粉尘,易燃易爆、单调和放射性等恶劣的环境下工作。(www.61k.com)机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。机械手越来越广泛的得到了应用,在机械行业中它可用于零部件组装 ,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,它适应于中、小批量生产,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。当工件变更时,柔性生产系统很容易改变,有利于企业不断更新适销对路的品种,提高产品质量,更好地适应市场竞争的需要。而目前我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计是非常有意义的。
3
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
第一章 引言
1.1. 工业机械手设计的目的
机械设计制造及其自动化专业是为了培养从事机械设计、制造行业的人才而开设的专业。(www.61k.com)而工业机械手课程设计不仅培养设计者对机械的认识、运用能力而且也增进了对机械工业发展的了解和认知。
工业机械手的设计涉及:机械设计原理、液压、气压、电气传动及单片机、PLC、可编程控制器等控制系统与基本理论知识。
设计目的:
1、 培养学生的机械设计能力;
2、 扩展学生的知识结构;
3、 帮助学生培养综合运用能力;
4、 是课堂教学的有益补充。
1.2.机械手的设计方案
1.2.1. 机械手大臂的设计要求
l、行程:0—500mm,任意可凋。
2、运动时间:0—5S
3、运动平稳,定位可靠、精确。
4、结构设计时考虑伸缩臂原位时的整机平衡。
5、与旋转机座、伸缩臂为法兰联接。
6、采用燕尾滑动导轨,铸造毛坯。
1.2.2运动方案
C1 液压驱动方案
采用直线油缸。考虑手臂最低工位,推荐采用上图所示变行程措施。
4
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
C2 机械驱动方案
采用滚珠丝杠传动。[www.61k.com]考虑伸缩臂等惯性力作用对定位的影响。
1.2.3设计内容
方案C1
l、大臂结构设计;
2、大臂结构强度计算;
3、驱动系统液压油流量、压力、驱动油缸的选择;
4、齿轮强度。
5、成果要求:画大臂部件装配图1张,大臂零件图1张
方案C2
1、大臂结构设计;
2、大臂结构强度计算;
3、传动系统设计:电机选择、丝杠选择(公称直径、导程);
4、丝杠强度计算;
5、成果要求:画大臂部件装配图1张、丝杠零件图1张。
1.2.4 执行机构
包括手部、手腕、手臂和立柱等部件,有的还增设行走机构。
1、手部 即与物件接触的部件。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
2、手腕 是联接手部和手臂的部件,其调整或改变工件方位的作用。
3、手臂 支承手腕和手部的部件,用以改变工件的空间位置。
4、立柱 是支承手臂的部件,立柱也可以是手臂的一部分,手臂的回转运动和升降(或俯仰)运动均与立柱有密切的联系。
5
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
5、行走机构 机械手为了完成远距离的操作和扩大使用范围,可以增设滚轮行走机构。(www.61k.com)滚轮式行走机构可分为有轨的或是无轨的两种。
6、机座 它是机械手的基础部分,机械手执行机构的各部件和驱动系统均安装于基座上,故起支承和联接的作用。
7、其它部分 行程检测装置和传感装置等。
行程检测装置是检测和控制机械手各运动行程(位置)的装置。
传感装置其中装有某种传感器,使手指具有敏感性和自控性,用以反映手指与物件是否接触、物件有无滑下或脱落、物件的位置是否准确、手指对物件的握紧力是否与物件的重量相适应。
1.2.5运动机构
1.直角坐标机器人结构
直角坐标机器人的空间运动是用三个相互垂直的直线运动来实现的,如图1-1.a。由于直线运动易于实现全闭环的位置控制,所以,直角坐标机器人有可能达到很高的位置精度(μm级)。但是,这种直角坐标机器人的运动空间相对机器人的结构尺寸来讲,是比较小的。因此,为了实现一定的运动空间,直角坐标机器人的结构尺寸要比其他类型的机器人的结构尺寸大得多。
直角坐标机器人的工作空间为一空间长方体。直角坐标机器人主要用于装配作业及搬运作业,直角坐标机器人有悬臂式,龙门式,天车式三种结构。
2.圆柱坐标机器人结构
圆柱坐标机器人的空间运动是用一个回转运动及两个直线运动来实现的,如图1-1.b。这种机器人构造比较简单,精度还可以,常用于搬运作业。其工作空间是一个圆柱状的空间。
3. 球坐标机器人结构
球坐标机器人的空间运动是由两个回转运动和一个直线运动来实现的,如图1-1.c。这种机器人结构简单、成本较低,但精度不很高。主要应用于搬运作业。其工作空间是一个类球形的空间。
6
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
4. 关节型机器人结构
关节型机器人的空间运动是由三个回转运动实现的,如图1-1.d。[www.61k.com]关节型机器人动作灵活,结构紧凑,占地面积小。相对机器人本体尺寸,其工作空间比较大。此种机器人在工业中应用十分广泛,如焊接、喷漆、搬运、装配等作业,都广泛采用这种类型的机器人。
关节型机器人结构,有水平关节型和垂直关节型两种。
图1-1 四种机器人坐标形式
1.3 机械手腰座结构的设计
进行了机械手的总体设计后,就要针对机械手的腰部、手臂、手腕、末端执行器等各个部分进行详细设计。
1.3.1 机械手腰座结构的设计要求
工业机器人腰座,就是圆柱坐标机器人,球坐标机器人及关节型机器人的回转基座。它是机器人的第一个回转关节,机器人的运动部分全部安装在腰座上,它承受了机器人的全部重量。在设计机器人腰座结构时,要注意以下设计原则:
1.腰座要有足够大的安装基面,以保证机器人在工作时整体安装的稳定性。
2.腰座要承受机器人全部的重量和载荷,因此,机器人的基座和腰部轴及轴承的结构要有足够大的强度和刚度,以保证其承载能力。
3.机器人的腰座是机器人的第一个回转关节,它对机器人末端的运动精度影响最大,因此,在设计时要特别注意腰部轴系及传动链的精度与刚度的保证。
4.腰部的回转运动要有相应的驱动装置,它包括驱动器(电动、液压及气动)及减速器。驱动装置一般都带有速度与位置传感器,以及制动器。 7
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
5.腰部结构要便于安装、调整。(www.61k.com]腰部与机器人手臂的联结要有可靠的定位基准面,以保证各关节的相互位置精度。要设有调整机构,用来调整腰部轴承间隙及减速器的传动间隙。
6.为了减轻机器人运动部分的惯量,提高机器人的控制精度,一般腰部回转运动部分的壳体是由比重较小的铝合金材料制成,而不运动的基座是用铸铁或铸钢材料制成。
1.3.2 设计具体采用方案
腰座回转的驱动形式要么是电机通过减速机构来实现,要么是通过摆动液压缸或液压马达来实现,目前的趋势是用前者。因为电动方式控制的精度能够很高,而且结构紧凑,不用设计另外的液压系统及其辅助元件。考虑到腰座是机器人的第一个回转关节,对机械手的最终精度影响大,故采用电机驱动来实现腰部的回转运动。一般电机都不能直接驱动,考虑到转速以及扭矩的具体要求,采用大传动比的齿轮传动系统进行减速和扭矩的放大。因为齿轮传动存在着齿侧间隙,影响传动精度,故采用一级齿轮传动,采用大的传动比(大于100),同时为了减小机械手的整体结构,齿轮采用高强度、高硬度的材料,高精度加工制造,尽量减小因齿轮传动造成的误差。腰座具体结构如图1-2所示:
图1-2 腰座结构图
8
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
1.4 工业机械手的概述
机械手是在机械化、自动化生产过程中发展起来的一种新型装置。[www.61k.com)近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用,例如:
1.机床加工工件的装卸,特别是在自动化车床、组合机床上使用较为普遍。
2.在装配作业中应用广泛,在电子行业中它可以用来装配印制电路板,在机械行业中
它可以用来组装零部件。
3.可在劳动条件差,单调重复易子疲劳的工作环境工作,以代替人的劳动。
4.可在危险场合下工作,如军工品的装卸、危险品及有害物的搬运等。
5.宇宙及海
1.5 机械手腕部的结构设计
机器人的手臂运动(包括腰座的回转运动),给出了机器人末端执行器在其工作空间中的运动位置,而安装在机器人手臂末端的手腕,则给出了机器人末端执行器在其工作空间中的运动姿态。机器人手腕是机器人操作机的最末端,它与机器人手臂配合运动,实现安装在手腕上的末端执行器的空间运动轨迹与运动姿态,完成所需要的作业动作。
1.机器人手腕的自由度数,应根据作业需要来设计。机器人手腕自由度数目愈多,各关节的运动角度愈大,则机器人腕部的灵活性愈高,机器人对对作业的适应能力也愈强。但是,自由度的增加,也必然会使腕部结构更复杂,机器人的控制更困难,成本也会增加。因此,手腕的自由度数,应根据实际作业要求来确定。在满足作业要求的前提下,应使自由度数尽可能的少。一般的机器人手腕 9
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
的自由度数为2至3个,有的需要更多的自由度,而有的机器人手腕不需要自由度,仅凭受臂和腰部的运动就能实现作业要求的任务。(www.61k.com]因此,要具体问题具体分析,考虑机器人的多种布局,运动方案,选择满足要求的最简单的方案。
2.机器人腕部安装在机器人手臂的末端,在设计机器人手腕时,应力求减少其重量和体积,结构力求紧凑。为了减轻机器人腕部的重量,腕部机构的驱动器采用分离传动。腕部驱动器一般安装在手臂上,而不采用直接驱动,并选用高强度的铝合金制造。
3.机器人手腕要与末端执行器相联,因此,要有标准的联接法兰,结构上要便于装卸末端执行器。
4.机器人的手腕机构要有足够的强度和刚度,以保证力与运动的传递。
5.要设有可靠的传动间隙调整机构,以减小空回间隙,提高传动精度。
6.手腕各关节轴转动要有限位开关,并设置硬限位,以防止超限造成机械损坏。
通过对数控机床上下料作业的具体分析,考虑数控机床加工的具体形式及对机械手上下料作业时的具体要求,在满足系统工艺要求的前提下提高安全和可靠性,为使机械手的结构尽量简单,降低控制的难度,本设计手腕不增加自由度,实践证明这是完全能满足作业要求的,3个自由度来实现机床的上下料完全足够。具体的手腕(手臂手爪联结梁)结构见图1-3。
水平液压缸支承板手臂手
爪联结
梁
执行手爪
图1-3手爪联结结构
10
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
图1-4 机械手控制图
1.在传输带A端部,安装了光电开关PS,用以检测洋的开发。(www.61k.com]
2.机械手在原位时,按下起动按钮,系统起动,传送带A运转。当光电开关检测到物品后,传送带A停。
3.传输带A停止后,机械手进行一次循环动作,把物品从传送带A上搬到传送带B(连续运转)上。
4.机械手返回原位后,自动再起动传送带A运转,进行下一个循环。
5.按下停止按钮后,应等到整个循环完成后,才能使机械手返回原位,停止工作。
6.机械手的上升/下降和左移/右移的执行结构均采用双线圈的二位电磁阀驱动液压装置实现,每个线圈完成一个动作。
7.抓紧/放松由单线圈二位电磁阀驱动液压装置完成,线圈通电时执行抓紧动作,线圈断电时执行放松动作。
8.机械手的上升、下降、左移、右移动作均由极限开关控制。
9.抓紧动作由压力继电器控制,当抓紧时,压力继电器动合触点闭合。放松动作为时间控制(设为2s)。
11
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
第二章 系统工作工程
2.1 系统的介绍
本系统的机械手部分由底盘、立杆、手臂、手组成,其中底盘由一个步进电机驱动,可顺逆时针旋转;立杆由一个步进电机驱动,可上下移动;手臂由一个步进电机驱动,可前后伸缩;手由气泵控制,可抓紧和放松。(www.61k.com)在相应位置都有位置检测信号用于定位。
2.2 出货过程
从复位位置启动,根据要求到相应出货台(1,2,3号货台),此时底盘转动到要求位置,立柱下降,手臂伸出,定位后手抓货物,立柱上升,同时手臂回收(以免运行中与其它设备相撞),然后到相应出货台(左,或右出货台),立柱下降,手臂伸出,手打开,把货物放在相应出货台上。
2.3 进货过程
从复位位置启动,根据要求到相应出货台(左,或右出货台),此时底盘转动到要求位置,立柱下降,手臂伸出,定位后手抓货物,立柱上升,同时手臂回收(以免运行中与其它设备相撞),然后到相应出货台(1,2,3号货台),立柱下降,手臂伸出,手打开,把货物放在相应出货台上。
12
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
第三章 系统设计思想
3.1步进控制电路设计思想
PLC继电器式输出模块工作速度较低,故采用高频脉冲方波发生器,给出步进脉冲,其振荡频率按步进电机速度设置,步进量的控制采用位置检测,根据位置检测信号用PLC的输出点切断进给电机,实现步进电机的停车, 其程序流程图如图所示。[www.61k.com)
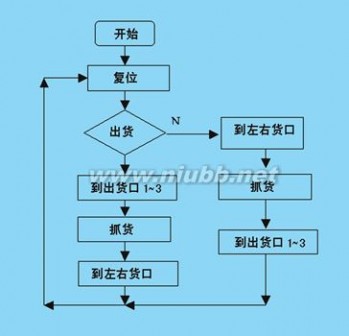
图1-4程序流程图
在整个机械手运行控制过程中,采用限位开关以及面板操作开关以及系统逻辑开关作为输入点,整个系统中底盘有5个限位开关,分别作为5个位置的定位输入点,立柱有4个限位开关,分别为1个复位开关、一号位限位输入量、上限位、下限位。手臂有3个限位开关:手臂复位限位数入点、手臂前限位、手臂后限位。抓手限位开关,为抓手复位输入点。一共13个限位开关完成全部的控制输入。各限位开关分布情况见图1,
由于在整个控制过程中全部是通过控制步进电机驱动模块再驱动步进电机执行。这里对用集成脉冲输出触发步进电机驱动器原理进行说明。S7-200 PLC(CPU 226)的Q0.0和Q0.1分别对升/降步进电机、前/后步进电机发送脉冲;CPU 226的Q0.2对转盘步进电机发送脉冲。而步进电机的正/反转则分别是 13
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
CPU 226的Q0.4和Q0.5分别对升/降步进电机、前/后步进电机实行控制;CPU 226 的Q0.6和Q0.7分别对转盘步进电机正反、抓手气泵开关实行控制。[www.61k.com)
机械手PLC程序的设计编写采用了STEP 7-Micro/WIN32软件的数据表(STL)的形式。程序设计修改方便,设计完成可联机调试,没有问题再把步进电机接上。
上位机监控软件采用北京亚控的组态王软件,通过变量映射实现组态软件的变量与PLC的寄存器的动态连接,从而实现了上位机对PLC的监控。
3.2系统构成
(1)气动系统
该系统的气动件全部采用的是SMC公司的产品,共用了48个气缸,48个两位四通阀,2个真空发生器,其中检盖器由测长气缸制成,B箱输送机由1米长的无出杆气缸制成,其它所有机械手、转运机等均由普通气缸制成。
(2)传送系统
包括8个传送带和1个输送机,除输送机由无出杆气缸制成外,传送带均由步进电机驱动,共使用了8台步进电机。
(3)检测系统
包括96个行程开关、6个接近开关、5个碰撞开关和1个测长气缸。
(4)控制系统
该系统的全部控制功能由一台松下电工FP3型可编程控制器实现,用于控制步进电机的的脉冲单元8个,控制系统原理框图如图1-5所示。
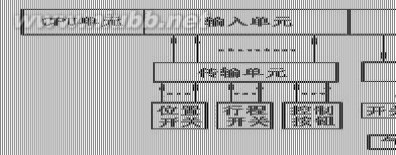
图1-5控制系统原理框图
14
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
3.3 PLC 软件系统设计的步骤
在了解了程序结构和编程方法的基础上,就要实际地编写 PLC 程序了。(www.61k.com)编写 PLC 程序和编写其他计算机程序一样,都需要经历如下过程。
1)对系统任务分块
分块的目的就是把一个复杂的工程,分解成多个比较简单的小任务。这样就把一个复杂的大问题化为多个简单的小问题。这样可便于编制程序。
2)编制控制系统的逻辑关系图
从逻辑关系图上,可以反应出某一逻辑关系的结果是什么,这一结果又英国导出哪些动作。这个逻辑关系可以是以各个控制活动顺序为基准,也可能是以整个活动的时间节拍为基准。逻辑关系图反映了控制过程中控制作用与被控对象的活动,也反应了输入与输出的关系。
3)绘制各种电路图
绘制各种电路的目的,是把系统的输入输出所设计的地址和名称联系起来。这是很关键的一步。在绘制 PLC 的输入电路时,不仅要考虑到信号的连接点是否与命名一致,还要考虑到输入端的电压和电流是否合适,也要考虑到在特殊条件下运行的可靠性与稳定条件等问题。特别要考虑到能否把高压引导到 PLC 的输入端,把高压引入 PLC 输入端,会对 PLC 造成比较大的伤害。在绘制 PLC 的输出电路时,不仅要考虑到输出信号的连接点是否与命名一致,还要考虑到 PLC 输出模块的带负载能力和耐电压能力。此外,还要考虑到电源的输出功率和极性问题。在整个电路的绘制中,还要考虑设计的原则努力提高其稳定性和可靠性。虽然用 PLC 进行控制方便、灵活。但是在电路的设计上仍然需要谨慎、全面。因此,在绘制电路图时要考虑周全,何处该装按钮,何处该装开关,都要一丝不苟。
15
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
第四章 PLC机械手的形式
4.1 两手呈180°的回转式单臂双手机械手;
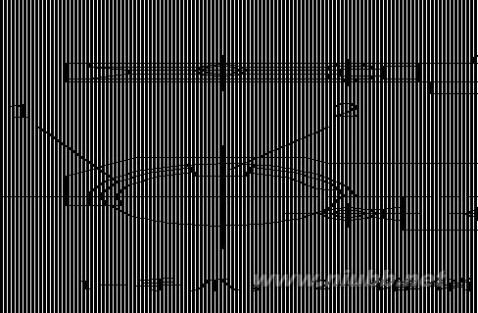
图1-6机械手臂和手爪
4.2 两手互相垂直的回转式单臂双手机械手
机械手是一种能模拟人的手臂的部分动作,按预定的程序、轨迹及其它要求,实现抓取、搬运工件或操纵工具的自动化装置;而可编程控制器(PLC)由于其具有的高可靠性、编程方便、易于使用和修改,易于扩展和维护,环境要求低、体积小巧,安装调试方便,在工业控制中有着广泛的应用。(www.61k.com]根据我们所设计的机械手的驱动部件为步进电机的特点,应用PLC移位寄存SFT指令可以很方便、灵活地对机械手进行控制。1 总体功能简介1.1 机械手的结构及运动机械手的结构主要由柱身、绕着柱身作360°正、反方向旋转的手臂、手臂的俯仰运动.
16
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
图1-7两手互相垂直的回转式单臂双手机械手
4.3 机械手传送系统梯形图
如图2-7。(www.61k.com]图中从第0行到第27行为回原位状态程序。从第28行到第66行,为手动单步操作程序。从第67行到第129行为自动操作程序。这三部分程序(又称为模块)是图3的操作系统运行的。
回原位程序和自动操作程序。是用步进顺控方式编程。在各步进顺控末行,都以RET结束本步进顺控程序块。但两者又有不同。回原位程序不能自动返回初始态S1。而自动操作程序能自动返回初态S2。

17
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
图1-8传送梯形图
18
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
4.4 指令语句表
19
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
4.5机械手末端执行器(手爪)的结构设计
机器人末端执行器是安装在机器人手腕上用来进行某种操作或作业的附加装置。(www.61k.com)机器人末端执行器的种类很多,以适应机器人的不同作业及操作要求。末端执行器可分为搬运用、加工用和测量用等。
加工用末端执行器是带有喷枪、焊枪、砂轮、铣刀等加工工具的机器人附加装置,用来进行相应的加工作业。测量用末端执行器是装有测量头或传感器的附加装置,用来进行测量及检验作业。
在设计机器人末端执行器时,应注意以下问题;
1.机器人末端执行器是根据机器人作业要求来设计的。一个新的末端执行器的出现,就可以增加一种机器人新的应用场所。因此,根据作业的需要和人们的想象力而创造的新的机器人末端执行器,将不断的扩大机器人的应用领域。
2.机器人末端执行器的重量、被抓取物体的重量及操作力的总和机器人容许的负荷力。因此,要求机器人末端执行器体积小、重量轻、结构紧凑。
3.机器人末端执行器的万能性与专用性是矛盾的。万能末端执行器在结构上很复杂,甚至很难实现,例如,仿人的万能机器人灵巧手,至今尚未实用化。目前,能用于生产的还是那些结构简单、万能性不强的机器人末端执行器。从工业实际应用出发,应着重开发各种专用的、高效率的机器人末端执行器,加之以末端执行器的快速更换装置,以实现机器人多种作业功能,而不主张用一个万能的末端执行器去完成多种作业。因为这种万能的执行器的结构复杂且造价昂贵。
4.通用性和万能性是两个概念,万能性是指一机多能,而通用性是指有限的末端执行器,可适用于不同的机器人,这就要求末端执行器要有标准的机械接口(如法兰),使末端执行器实现标准化和积木化。
5.机器人末端执行器要便于安装和维修,易于实现计算机控制。用计算机控制最方便的是电气式执行机构。因此,工业机器人执行机构的主流是电气式,其次是液压式和气压式(在驱动接口中需要增加电-液或电-气变换环节)。
结合具体的工作情况,本设计采用连杆杠杆式的手爪。驱动活塞往复移动,通过活塞杆端部齿条,中间齿条及扇形齿条使手指张开或闭合。手指的最小开度 20
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
由加工工件的直径来调定。(www.61k.com)本设计按照工件的直径为50mm来设计。手爪的具体结构形式如图2-5所示:

图2-5机械手末端执行手爪结构图
机器人是由多级联杆和关节组成的多自由度的空间运动机构。除直接驱动型机器人以外,机器人各联杆及各关节的运动都是由驱动器经过各种机械传动机构进行驱动的。机器人所采用的传动机构与一般机械的传动机构相类似。常用的机械传动机构主要有螺旋传动、齿轮传动、同步带传动、高速带传动等。由于传动部件直接影响着机器人的精度、稳定性和快速响应能力,因此,应设计和选择满足传动间隙小,精度高,低摩擦、体积小、重量轻、运动平稳、响应速度快、传递转矩大、谐振频率高以及与伺服电动机等其它环节的动态性能相匹配等要求的传动部件。
21
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
第五章 液压传动系统设计
5.1液压传动系统设计计算
5.1.1确定液压系统基本方案
液压执行元件大体分为液压缸和液压马达,前者实现直线运动,后者实现回转运动。(www.61k.com)二者的特点及适用场合见表3-1:
本设计因为机械手的形式为圆柱坐标形式,具有3个自由度,一个转动,两个移动自由度。同时考虑机械手的工作载荷和工作现场环境对机械手布局以及
22
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
定位精度的具体要求以及计算机的控制的因素,腰部的回转用电机驱动实现,剩下的两个运动均为直线运动。(www.61k.com)因此,机械手的水平手臂和垂直手臂都采用单活塞杆液压缸,来实现直线往复运动。
5.1.2拟定液压执行元件运动控制回路
液压执行元件确定后,其运动方向和运动速度的控制是液压回路的核心问题。
方向控制是用换向阀或是逻辑控制单元来实现。对于一般中小流量的液压系统,通过换向阀的有机组合来实现所要求的动作。对高压大流量的系统,多采用插装阀与先导控制阀的逻辑组合来实现。
速度控制通过改变液压执行元件输入或输出的流量或者利用密封空间的容积变化来实现。相应的调速方式有节流调速、容积调速以及二者结合的容积节流调速。
本设计的方向控制采用电磁换向阀来实现,而速度的控制主要采用节流调速,主要方式是采用比较简单的节流阀来实现。
5.1.3液压源系统的设计
液压系统的工作介质完全由液压源来提供,液压源的核心是液压泵。节流调速系统一般用定量泵供油,在无其他辅助油源的情况下,液压泵的供油量要大于系统的需油量,多余的油经溢流阀流回油箱,溢流阀同时起到控制并稳定油源压力的作用。容积调速系统多用变量泵供油,用安全阀来限定系统的最高压力。
油液的净化装置是液压源中不可缺的元件。一般泵的入口要装粗滤油器,进入系统的油液根据要求,通过精滤油器再次过滤。为防止系统中杂质流回油箱,可在回油路上设置磁过滤器。根据液压设备所处的环境及对温升的要求,还要考虑加热、冷却等措施。
本设计的液压系统采用定量泵供油,由溢流阀V1来调定系统压力。为了保证液压油的洁净,避免液压油带入污染物,故在油泵的入口安装粗过滤器,而在油泵的出口安装精过滤器对循环的液压油进行净化。
23
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
5.1.4绘制液压系统图
本机械手的液压系统图如图5-1所示,
它拥有垂直手臂的上升、下降,水平伸缩缸/的前伸、后缩,以及执行手爪的夹紧、张开三个执行机构。[www.61k.com)
其中,泵由三相交流异步电动机M拖动;系统压力由溢流阀V1调定;1DT的得失电决定了动力源的投入与摘除。
考虑到手爪的工作要求轻缓抓取、迅速松开,系统采用了节流效果不等的两个单向节流阀。当5DT得电时,工作液体经由节流阀V5进入柱塞缸,实现手爪的轻缓抓紧;当6DT失电时,工作液体进入柱塞缸中,实现手爪迅速松开。
另外,由于机械手垂直升降缸在工作时其下降方向与负荷重力作用方向一致,下降时有使运动速度加快的趋势,为使运动过程的平稳,同时尽量减小冲击、振动,保证系统的安全性,采用V2构成的平衡回路相升降油缸下腔提供一定的排油背压,以平衡重力负载。

图5-1 机械手的液压系统原理图
24
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
第六章 零件图工艺分析
6.1数控铣削加工:
针对数控铣削加工的特点,下面列举出一些经常遇到的工艺性问题作为对零件图进行工艺性分析的要点来加以分析与考虑。[www.61k.com)
(1)图纸尺寸的标注方法是否方便编程?构成工件轮廓图形的各种几何元素的条件是否充要?各几何元素的相互关系(如相切、相交、垂直和平行等)是否明确?有无引起矛盾的多余尺寸或影响工序安排的封闭尺寸?等等。
(2)零件尺寸所要求的加工精度、尺寸公差是否都可以得到保证?不要以为数控机床加工精度高而放弃这种分析。特别要注意过薄的腹板与缘板的厚度公差,“铣工怕铣薄”,数控铣削也是一样,因为加工时产生的切削拉力及薄板的弹性退让。极易产生切削面的振动,使薄板厚度尺寸公差难以保证,其表面粗糙度也将恶化或变坏。根据实践经验,当面积较大的薄板厚度小于3㎜时就应充分重视这一问题。
(3)内槽及缘板之间的内转接圆弧是否过小?
(4)零件铣削面的槽底圆角或腹板与缘板相交处的圆角半径r是否太大?
(5)零件图中各加工面的凹圆弧(R与r)是否过于零乱,是否可以统一?因为在数控铣床上多换一次刀要增加不少新问题,如增加铣刀规格,计划停车次数和对刀次数等,不但给编程带来许多麻烦,增加生产准备时间而降低生产效率,而且也会因频繁换刀增加了工件加工面上的接刀阶差而降低了表面质量。所以,在一个零件上的这种凹圆弧半径在数值上的一致性问题对数控铣削的工艺性显得相当重要。一般来说,即使不能寻求完全统一,也要力求将数值相近的圆弧半径分组靠拢,达到局部统一,以尽量减少铣刀规格与换刀次数。
(6)零件上有无统一基准以保证两次装夹加工后其相对位置的正确性?有些工件需要在铣完一面后再重新安装铣削另一面]。由于数控铣削时不能使用通用铣床加工时常用的试削方法来接刀,往往会因为工件的重新安装而接不好刀(即与上道工序加工的面接不齐或造成本来要求一致的两对应面上的轮廓错位)。为了避免上述问题的产生,减小两次装夹误差,最好采用统一基准定位,因此零件 25
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
上最好有合适的孔作为定位基准孔。(www.61k.com]如果零件上没有基准孔,也可以专门设置工艺孔作为定位基准(如在毛坯上增加工艺凸耳或在后续工序要铣去的余量上设基准孔)。如实在无法制出基准孔,起码也要用经过精加工的面作为统一基准。如果连这也办不到,则最好只加工其中一个最复杂的面,另一面放弃数控铣削而改由通用铣床加工。
(7)分析零件的形状及原材料的热处理状态,会不会在加工过程中变形?哪些部位最容易变形?因为数控铣削最忌讳工件在加工时变形,这种变形不但无法保证加工的质量,而且经常造成加工不能继续进行下去,“中途而废”,这时就应当考虑采取一些必要的工艺措施进行预防,如对钢件进行调质处理,对铸铝件进行退火处理,对不能用热处理方法解决的,也可考虑粗、精加工及对称去余量等常规方法。此外,还要分析加工后的变形问题,采取什么工艺措施来解决。
6.2影响切削用量的因素有:
机床切削用量的选择必须在机床主传动功率、进给传动功率以及主轴转速范围、进给速度范围之内。机床—刀具—工件系统的刚性是限制切削用量的重要因素。切削用量的选择应使机床—刀具—工件系统不发生较大的“振颤”。如果机床的热稳定性好,热变形小,可适当加大切削用量。
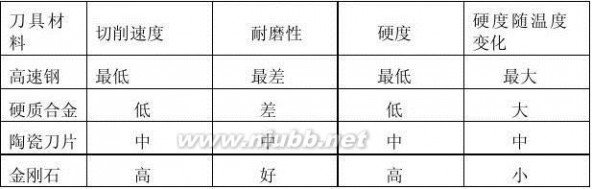
刀具刀具材料是影响切削用量的重要因素。表6-1是常用刀具材料的性能比较。
数控机床所用的刀具多采用可转位刀片(机夹刀片)并具有一定的寿命。机夹刀片的材料和形状尺寸必须与程序中的切削速度和进给量相适应并存入刀具参数中去。 工件不同的工件材料要采用与之适应的刀具材料、刀片类型,要
26
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
注意到可切削性。(www.61k.com]可切削性良好的标志是,在高速切削下有效地形成切屑,同时具有较小的刀具磨损和较好的表面加工质量。较高的切削速度、较小的背吃刀量和进给量,可以获得较好的表面粗糙度。合理的恒切削速度、较小的背吃刀量和进给量可以得到较高的加工精度。 冷却液冷却液同时具有冷却和润滑作用。带走切削过程产生的切削热,降低工件、刀具、夹具和机床的温升,减少刀具与工件的摩擦和磨损,提高刀具寿命和工件表面加工质量。使用冷却液后,通常可以提高切削用量。冷却液必须定期更换,以防因其老化而腐蚀机床导轨或其他零件,特别是水溶性冷却液。 铣削加工的切削用量包括:切削速度、进给速度、背吃刀量和侧吃刀量。从刀具耐用度出发,切削用量的选择方法是:先选择背吃刀量或侧吃刀量,其次选择进给速度,最后确定切削速度。
1.背吃刀量ap或侧吃刀量ae
背吃刀量ap为平行于铣刀轴线测量的切削层尺寸,单位为㎜。端铣时,ap为切削层深度;而圆周铣削时,为被加工表面的宽度。侧吃刀量ae为垂直于铣刀轴线测量的切削层尺寸,单位为㎜。端铣时,ae为被加工表面宽度;而圆周铣削时,ae为切削层深度,见图1-1。
背吃刀量或侧吃刀量的选取主要由加工余量和对表面质量的要求决定: 当工件表面粗糙度值要求为Ra=12.5~25μm时,如果圆周铣削加工余量小于5㎜,端面铣削加工余量小于6㎜,粗铣一次进给就可以达到要求。但是在余量较大,工艺系统刚性较差或机床动力不足时,可分为两次进给完成。
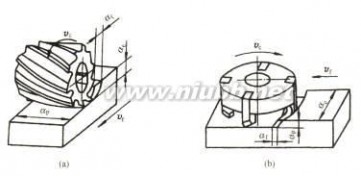
图6-1铣削加工的切削用量
当工件表面粗糙度值要求为Ra=3.2~12.5μm时,应分为粗铣和半精铣两步进行。粗铣时背吃刀量或侧吃刀量选取同前。粗铣后留0.5~1.0㎜余量,在半精铣时切除。
27
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
当工件表面粗糙度值要求为Ra=0.8~3.2μm时,应分为粗铣、半精铣、精铣三步进行。[www.61k.com]半精铣时背吃刀量或侧吃刀量取1.5~2㎜;精铣时,圆周铣侧吃刀量取0.3~0.5 ㎜,面铣刀背吃刀量取0.5~1 ㎜。
2.进给量f与进给速度Vf的选择
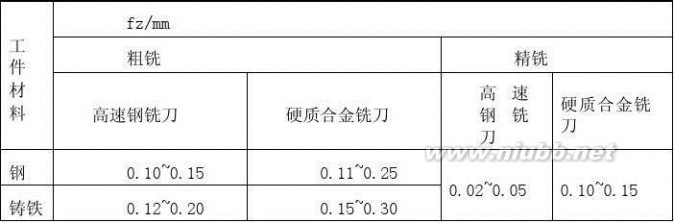
削加工的进给量f(㎜/r)是指刀具转一周,工件与刀具沿进给运动方向的相对位移量;进给速度Vf(㎜/min)是单位时间内工件与铣刀沿进给方向的相对位移量。进给速度与进给量的关系为Vf= nf(n为铣刀转速,单位r /min)。进给量与进给速度是数控铣床加工切削用量中的重要参数,根据零件的表面粗糙度、加工精度要求、刀具及工件材料等因素,参考切削用量手册选取或通过选取每齿进给量fz,再根据公式f =Zfz(Z为铣刀齿数)计算。
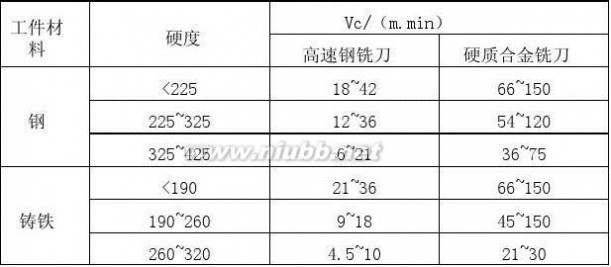
每齿进给量fz的选取主要依据工件材料的力学性能、刀具材料、工件表面粗糙度等因素。工件材料强度和硬度越高,fz越小;反之则越大。硬质合金铣刀的每齿进给量高于同类高速钢铣刀。工件表面粗糙度要求越高,fz就越小。每齿进给量的确定可参考表1-2选取。工件刚性差或刀具强度低时,应取较小值。
3.切削速度Vc
铣削的切削速度Vc与刀具的耐用度、每齿进给量、背吃刀量、侧吃刀量以及铣刀齿数成反比,而与铣刀直径成正比。其原因是当fz、ap、ae和Z增大时,刀刃负荷增加,而且同时工作的齿数也增多,使切削热增加,刀具磨损加快,从而限制了切削速度的提高。为提高刀具耐用度允许使用较低的切削速度。但是加大铣刀直径则可改善散热条件,可以提高切削速度。
铣削加工的切削速度Vc可参考表6-3选取,也可参考有关切削
28
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
用量手册中的经验公式通过计算选取。(www.61k.com)
典型工件的工艺分析
6.3平面凸轮的数控铣削工艺分析
图6-2所示为槽形凸轮零件,在铣削加工前,该零件是一个经过加工的圆盘,圆盘直径为Ф280㎜,带有两个基准孔Ф35㎜及Ф12㎜。Ф35㎜及Ф12㎜两个定位孔,X面已在前面加工完毕,本工序是在铣床上加工槽。该零件的材料为HT200,试分析其数控铣削加工工艺。
1.零件图工艺分析
该零件凸轮轮廓由HA、BC、DE、FG和直线AB、HG以及过渡圆弧CD、EF所组成。组成轮廓的各几何元素关系清楚,条件充分,所需要基点坐标容易求得。凸轮内外轮廓面对X面有垂直度要求。材料为铸铁,切削工艺性较好。
根据分析,采取以下工艺措施:
凸轮内外轮廓面对X面有垂直度要求,只要提高装夹精度,使X面与铣刀轴线垂直,即可保证。
2.选择设备
加工平面凸轮的数控铣削,一般采用两轴以上联动的数控铣床,因此首先要考虑的是零件的外形尺寸和重量,使其在机床的允许范围以内。其次考虑数控机床的精度是否能满足凸轮的设计要求。第三,看凸轮的最大圆弧半径是否在数
29
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
控系统允许的范围之内。(www.61k.com]根据以上三条即可确定所要使用的数控机床为两轴以上联动的数控铣床。
3.确定零件的定位基准和装夹方式
定位基准采用“一面两孔”定位,即用圆盘X面和两个基准孔作为定位基准。
根据工件特点,用一块320㎜×320㎜×40㎜的垫块,在垫块上分别精镗Ф35㎜及Ф12㎜两个定位孔(当然要配定位销),孔距离80±0.015㎜,垫板平面度为0.05㎜,该零件在加工前,先固定夹具的平面,使两定位销孔的中心连线与机床x轴平行,夹具平面要保证与工作台面平行,并用百分表检查,见图6-3。
4.确定加工顺序及走刀路线
整个零件的加工顺序的拟订按照基面先行、先粗后精的原则确定。因此应先加工用作定位基准的Ф35㎜及Ф12㎜两个定位孔、X面,然后再加工凸轮槽内外轮廓表面。由于该零件的Ф35㎜及Ф12㎜两个定位孔、X面已在前面工序加工完毕,在这里只分析加工槽的走刀路线,走刀路线包括平面内进给走刀和深度进给走刀两部分路线。平面内的进给走刀,对外轮廓是从切线方向切入;对内轮廓是从过渡圆弧切入。在数控铣床上加工时,对铣削平面槽形凸轮,深度进给有两种方法:一种是在xz(或yz)平面内来回铣削逐渐进刀到既定深度;另一种是先打一个工艺孔,然后从工艺孔进刀到既定深度。
进刀点选在P(150,0)点,刀具来回铣削,逐渐加深到铣削深度,当达到既定深度后,刀具在xy平面内运动,铣削凸轮轮廓。为了保证凸轮的轮廓表面有较高的表面质量,采用顺铣方式,即从P点开始,对外轮廓按顺时针方向铣削,对内轮廓按逆时针方向铣削。
30
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
图6-2槽形凸轮零件
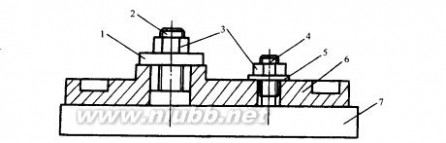
图6-3凸轮加工装夹示意图
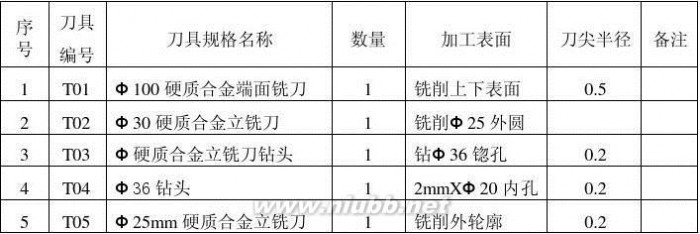
1—开口垫圈;2—带螺纹圆柱销;3—压紧螺母;4—带螺纹削边销;5—垫圈;6—工件;7—垫块 5.刀具的选择
根据零件结构特点,铣削凸轮槽内、外轮廓(即凸轮槽两侧面)时,铣刀直径受槽宽限制,同时考虑铸铁属于一般材料,加工性能较好,选用Ф18㎜硬质合金立铣刀,见表6-4。[www.61k.com]

31
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
6.切削用量的选择
凸轮槽内、外轮廓精加工时留0.2㎜铣削用量,确定主轴转速与进给速度时,先查切削用量手册,确定切削速度与每齿进给量,然后利用公式vc=πdn/1000计算主轴转速n,利用vf= nZfz计算进给速度。[www.61k.com]
7.填写数控加工工序卡片(见表6-5)

32

工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
33
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
结束语
本论文主要论述了工业机械手的设计的目的机械手的设计方案包括机械手大臂的设计要求.运动方案设计内容.执行机构.运动机构和PLC控制机械手设计以及工业机械手的概述等。(www.61k.com]还介绍了系统工作过程其中有系统的介绍.出货过程.进货过程等。阐述了系统设计思想包括步进控制电路设计思想.系统构成和PLC软件系统设计的步骤。还说了PLC机械手的形式等内容以及一些附属的内容等
本机械手控制系统结构紧凑,动作可靠,使用方便,已较好地应用于我校的科研教学中不仅能满足机械手的手动、半自动、自动等操作方式所需的大量按扭、开关、位置检测点的要求,更可通过接口元器件与计算机组成PLC工业局域网,实现网络通信与网络控制。使四轴联动简易机械手能方便地嵌入到工业生产流水线中。
34
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
致谢
为期两个月的毕业论文(设计)已接近尾声了,我的三年大学生涯也即将圈上一个句号。(www.61k.com]此刻我的心中却有些怅然若失,因为那些熟悉的机电系的恩师们和各位可爱的同学们,我们也即将挥手告别了。
无论是学习、工作生活上的问题,恩师们都会悉心给以指导解答,让我倍受感动。也就是在这里,给我的大学生涯设计点上了第一个逗号。我的学术论文创作的开始,也是从这里起步的。机电系的老师们,给我三年的学习、成长创造了一个良好的环境,引导我充分利用学校的学习资源,去发展、充实自我,而不曾虚度光阴。在此,我真诚的向你们道一声:“谢谢!”。
此次毕业设计能够顺利完成,我得到了很多老师、同学的关心、帮助和支持,在此本人首先向他们表示感谢。在毕业设计过程中,我的指导老师王周让给予很多专业方面的帮助。在设计前期的准备时,老师非常关注我的选题,指明选题方向,帮助分析题目的可行性和实际中可能出现的问题以及需要注意的事项;在进行方案选择时,为我指出所需要重点掌握的知识范围,并帮助我分析相应知识难点的原理,使我的毕业设计能顺利进行。
同时,我也要感谢大学三年所有教过和没有教过但给我很多帮助的老师,是他们的教导让我能在这里学到很多的专业知识,给我以后工作和学习打下了坚实的基础,是他们的谆谆教诲使我明白了更多为人处事的道理,给我今后的人生足迹烙下更深的印迹,在此我衷心地感谢所有帮助过我的老师。此外,非常感谢许多其他同学,他们很多想法和建议对我启发很大。在此一并致谢!
35
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
参考文献
[1] 吴宗泽,罗圣国.机械设计课程设计手册第二版[M].北京:高等教育出版社,1999.
[2]廖念钊,莫雨松,李硕根,杨兴骏.互换性与技术测量第四版[M].北京:中国计量出版社,2000.
[3]陈锦昌,刘就女,刘林.计算机工程制图[M].广州:华南理工大学出版社,1999.
[4]冯辛安,黄玉美,杜君文.机械制造装备设计[M].北京:机械工业出版社,2004.
[5]熊光华.数控机床[M]. 北京:机械工业出版社,2001.
[6]李峻勤,费仁元.数控机床及其使用与维修[M].北京:国防工业出版社,2000.
[7]张柱银,陈思义,明兴祖.数控原理与数控机床[M].北京:化学工业出版社,2003.
[8]林东.数控技术[M].北京:北京理工大学出版社,1995.
[9]王爱玲,白思远.现代数控机床[M].北京:国防工业出版社,2001.
[10]何存兴,张铁华.液压传动与气压传动第二版[M].湖北:华中科技大学出版社,2000.
[11]毛谦德,李振清.袖珍机械机械设计师手册第二版[M].北京:机械工业出版社,2001.
[12]朱龙根.简明机械零件设计手册[M].北京:机械工业出版社,2000. 36
工业机械手设计 工业机械手设计
陕西航空职业技术学院毕业论文
[13]王可.实用机床设计手册[M].辽宁: 辽宁科学技术出版社,1999.
[14]机床设计手册编写组,机应设计手册(3)北京:机械工业出版社,1986
[15]范俊广.数控机床及其应用。(www.61k.com]北京:机械工业出版社,1992
[16]张宝林,数控技术,北京:机械工业出版社,1997
[17]周开勤 机械零件手册,北京:高等教育出版社,1994
[18]卢小平,数控机床加工与编程,成都:电子科技大学出版社,1997
[19]李佳,数控机床及应用。北京:清华大学出版社,2002
[20]全国数按培训网络天津分中心,数控机床,北京:机械工业出版社,1997
[21]加工中心应用与维修编委会。加工中心应用与维修。北京:机械工业出版社,1997
[22]濮良贵 纪名刚。机械设计(第六版)北京:高等教育出版社,2000
37
四 : 浅谈工业机械手设计
机电工程技术2011年第40卷第07

期
浅谈工业机械手设计
刘少丽
(广东省国防科技技师学院,广东广州
510000)
,包括机械设计,气动传动系统设计,电气控制系统设计等部分。[www.61k.com],工作循环由PLC控制,可以通过改变程序来改变动作循环的顺序,。;方案文献标识码:A
文章编号:1009-9492(2011)07-0045-02
1引言
工业机械手是一种机械技术与电子技术相结合的高技术产品。采用工业机械手是提高产品质量与劳动生产率,实现生产过程自动化,改善劳动条件,减轻劳动强度的一种有效手段。它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术装备
[1]
广泛。如:轴类加工自动生产线及其上下料机械手、盘类加工自动生产线及其机械手、齿轮加工机床的上下料机械手等。
(3)高温作业自动化
在高温环境下作业(如热处理、铸造和锻造等),工人的劳动强度大,劳动条件差,采用机械手操作,更具有现实意义,如汽车钢板弹簧淬火机械手、压铸机用浇铸机械手等。
(4)操作工具
用机械手握持工具,在高温、粉尘及有害气体环境下进行自动化操作,可以使人脱离恶劣的劳动条件,并减轻劳动强度,提高劳动生产率和保证产品质量,如汽车车身等薄钢板的点焊工艺、自动喷漆或自动喷丸清砂工作等。
(5)进行特殊作业
在现代科学技术中,原子能的应用、海底资源的开发、星际探索等等都已为人们所熟悉。但放射性辐射,或海底、宇宙等环境,常常是人体不能直接接触或难以接近的,采用遥控机械手代替人们进行这种作业,既能完成这些特殊作业,又能长时间地安全地进行工作,成为人类向新的自然领域进军的一种有效手段。
总之,工业机械手的应用在工业生产中是多方面的,为了使机械手能发挥它的更多的作用,还应注意发展其它的辅助设备与之配合。随着机械手技术的进一步提高,它的适应性将会更强,应用面也将更广。
。
工业生产上应用的机械手,由于使用场合和工作要求的不同,其结构型式亦各不相同,技术复杂程度也有很大差别。但它们都有类似人的手臂、手腕和手的部分动作及功能;一般都能按预定程序,自动地、重复循环地进行工作。
2机械手的应用
机械手在工业生产中的应用,几乎遍及各行各业。归纳起来,大致有如下几个方面。
(1)合单机实现自动化
生产上出现的许多高效专用加工设备(如各种专用机床等),如果工件的装卸等辅助作业,继续由人工操作,不仅会增加工人劳动强度,同时亦不能充分发挥专用设备的效能,必然会影响劳动生产率的提高。若采用机械手代替人工上、下料,则可改变上述不相适应的情况,实现单机自动化生产,并为实现多机床看管提供了条件,如:自动机床及其上下料机械手、冲压机械手、注塑机及其取料机械手等。
(2)组成自动生产线
在单机自动化的基础上,若采用机械手自动装卸和输送工件,可使一些单机连接成自动生产线。目前在轴类和盘类工件的生产线上,采用机械手来实现自动化生产尤为
收稿日期:2011-05-30
3总体方案的拟定
要全面综合考虑,尽可能使之做到结构简单、紧凑、容易,操作安全可靠,安装维修方便,经济性好。
45
工业机械手设计 浅谈工业机械手设计
工业自动化
机电工程技术2011年第40卷第07期
图1所示为机械手各个系统间的相互关系。(www.61k.com](1)驱动方式的确定
现时机械手的驱动方式主要有液压传动机械手、气压传动机械手、电动机械手、机械传动机械手。结合本设计工业机械手的各项参数要求,选取气压传动机械手
[2]
。
气压传动机械手,是以压缩空气的压力来驱动执行机构运动的机械手。其特点是压缩空气粘度小,气源获得方便,空气作为介质对环境污染少,使用安全,气动元件工作压力较低,维修方便,造价低。但排出之空气产生哨叫声,噪音大。
图2斜楔块杠杆式手爪
(5)机械手的总体布置方案
为了使整个机构尽量趋于轻便化简单

,本次设计将摆动气缸安放在升降气缸之下,
如图3所示。
图1机械手各系统间的关系
(2)机械手手部的确定
手部是机械手的关键部件,是用来抓取工件或握持工具的机构。由于抓取的对象情况复杂(如尺寸、形状、重量等的变化),所使用的手指机构种类也是多种多样。通常都是根据某一特定工作要求而专门设计的。由于本次设计的工件是一个Ф50~Ф70mm的圆棒体,重量比较轻。故手部机构选取斜楔块杠杆式手爪,此种型式的活动灵敏,但夹紧力不大,适用于轻负荷工作,如图2所示。
(3)机械手腕部的确定
手腕是连接手指与手臂,起支撑作用的机构。它能使手部在空间任意角度取放工件。一般通用机械手手腕部分有三个活动自由度,即回转、摆动和俯仰。在本次设计中只要求手腕部分实现回转,故手腕部分的驱动系统选取回转气缸。
(4)机械手手臂部分的确定
机械手手臂部分是支承手部与手腕部分,并带动工件完成作业的主要部件。其一般具有三个自由度的运动,即伸缩、回转、俯仰或升降运动。它是实现工件运动速度和精度的部件,所承受的静、动负荷较大。故手臂部分的驱动系统选取三个气缸来实现其三个自由度的运动,分别是两个伸缩缸、一个回转气缸。
图3
总体布置方案
手爪+夹紧缸+手腕回转气缸+伸缩气缸
61阅读请您转载分享:
+
升降气缸
+
摆动气缸
4总结
工业机械手可以代替人手的繁重劳动,显著减轻工人
(下转第149页)
46
工业机械手设计 浅谈工业机械手设计
机电工程技术2011年第40卷第07期
(14)扩展不确定度的确定
对于检测试验室,可以不给自由度,U=k·u。[www.61k.com]如果标准中或用户对置信概率没有规定时,包含因子通常取k=2,对应约95%的置信概率。
(15)测量不确定度合理性验证
验证方法可采用下述方法之一,通过比对完成。
2)本单位允许偏离的范围及其控制措施
①有关人员的上岗证正在办理中,而又急需开展相关
工作时,应在质量监督员监督下进行工作,原始记录应由执行人员和质量监督员共同签署;
②仪器设备由于客观原因超过检定有效期或新购置设
备来不及送检而又急需使用时,应在工作结束后及时送检,如检定不合格,应立即采取补救措施;
1)比对法
用两台不确定度同为U的测试系统测量同一稳定的被测对象进行比对,比对结果差为ya-yb,应满足:
③检测工作中确实不能完全按照标准、规范执行或超
出其预定范围使用时,应按经批准的偏离方案进行,事后应及时做比对或验证试验;
ya-yb燮姨=姨U,则评定合理性满意。2)多台比对法
用三台或三台以上同等水平的测试系统测量同一稳定的被测对象进行比对,多台(n台)测量结果的平均值为
④当环境条件超出仪器设备规定的使用范围、标准和
规范的规定或样品保存要求,而又急需进行检测工作时,应在事后按规定的环境条件下进行比对试验,验证此前的结果;
y,其中某一台测试系统的测量结果为y1,应满足yi-y燮
姨
U,则该台测试系统的测量不确定度评定合理性满⑤因工作急需临时委托检测分包单位,应在事后对其
资格和能力进行补充评审;
意。⑥在实施上述偏离的情况下,若事后的比对、验证结
果表明,其误差超出允许的范围时,应视为无效,对已出具的检测报告进行跟踪纠正。
检测人员对非计算机和非自动化设备所进行的计算和
5检测数据控制
数据转换应定期进行系统和适当的检查。利用计算机或自动化设备对检测数据进行采集、处理、记录、报告、存储或检查时,应确保:
(1)由实验室开发的计算机软件应文件化至足够详细程度,并对其适用性进行确认;
(2)建立并实施数据保护程序,这些程序包括(但不限于)数据的输入或采集、数据存储、数据传输和数据处理的完整性和保密性;
(3)维护计算机和自动化设备,确保其功能正常,并提供保护检测数据完整性所必须的环境条件和运行条件偏离(以下简称偏离)应符合以下方面。
[1]
6结束语
综上所述,无论是标准方法、实验室自制方法,还是其它期刊等发表的方法,实验室在开展检测时都要严格选择检测方法,对使用的方法通过不确定度、比对、重复试验等手段进行验证确认,履行必要的程序,以证明实验室能力满足标准要求,同时证明标准的适用性。检测方法的确认也是合理有效的质量控制手段和监控检测/校准工作过程,预见到可能出现问题或及时发现问题的存在,使得实验室的检测活动处于一种有效的受控状态,保证检测数据的准确出具。
参考文献:
[1]CNAS-CL01:2006.检测和校准实验室能力认可准则[S].[2]JJF1059-1999.测量不确定度评定与表示[S].
第一作者简介:曹剑君,女,1981年生,山西太原人,大学本科,工程师。研究领域:机械产品检测。
。
实验室检测工作中可能遇到的对程序、标准、规范的
1)允许偏离的原则①不违反有关法律、法规;②不违背本单位的质量方针;
③不影响检测工作的公正性、科学性和结果的准确
性;
(编辑:王智圣)
④偏离许可申请只适用于工作急需或其他特殊情况。
姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨姨
(上接第46页)
的劳动强度,改善劳动条件,提高劳动生产率和生产自动化水平。工业生产中经常出现的笨重工件的搬运和长期、频繁、单调的操作,采用机械手是有效的;此外,它能在高温、低温、深水、宇宙、放射性和其它有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。
参考文献:
[1]吴振彪.工业机械人[M].武汉:华中理工大学出版社,
作者简介:刘少丽,女,1978年生,广东饶平人,大学本科,助理讲师。研究领域:机械制造。已发表论文2篇。
2003.
[2]徐影.机械设计手册:第3卷[M].北京:机械工业出版社,
2002.8
(编辑:吴智恒)
149
工业机械手设计 浅谈工业机械手设计

Abstracts
Electronic, Guangzhou Panyu Polytechnic, Guangzhou511483, China)
Abstract: The functional conception of the bullfighting toy robot system was introduced. Then, based on single-chip STC89C52, the bullfighting toy robot was designed. Through the sensors, such as photoelectric triode, the input signals were converted to digital signals and they are processed and controlled by single-chip. The results show that the robot could simulate the reaction of cattle in the Bullring.
Key words: STC89C52; robot; photoelectric triode
11-07-50 Software Design of Predictive-Fuzzy Control in Slurry Humidity
XIA Guo-hong (School of Mechanical and Electronic Engineering,
Huangshi Institute of Technology, Huangshi 435003, China)
11-07-39 Design of Virtual Oscilloscope Based on Microcontroller and Upper-Computer
HU Li-jun, HU Shu-wen(Jiangxi Environmental Engineering Vocational
College, Ganzhou341000, China)
Abstract: Respect to the difficulty of building the precise mathematic model by slurry humidity factor, which have nonlinear, big inertia and pure delay characteristic, we design a device of Predicative-Fuzzy Control in slurry humidity, and elaborate its working principle. In addition the software involving Predicative-Fuzzy Control part has been designed and the flow diagram of procedure has been provided as well.
61阅读请您转载分享:
Key words: slurry humidity; Predicative-Fuzzy Control; software design
Abstract: Introduces a method of virtual oscilloscope based on microcontroller and upper-computer after the features of serial communication of microcontroller and PC analyzed, the hardware and software structure are also discussed in detail. This method is simple, reliable, and it has higher application value.
Key words: microcontroller; upper-computer; virtual oscilloscope
11-07-52 A Data Exchanging System Used in Amusement Equipment Based on CAN-bus
JIA Liao-chuan, GAO Pan(Golden Horse Amusement Equipment Co.,
Ltd, Zhongshan528400, China)
11-07-42 Application on VS1003b in the Electroacoustic Disaster Alarm
LIU Xue-fang,WU Kun-yu(Guangzhou Research Institute of O-M-E
Technology, Guangzhou510631, China)
Abstract: This paper describes a new type of electroacoustic disaster alarm. The electroacoustic disaster alarm uses VS1003b as decoder chip of sound sources. It makes alarm sound output in a long time, not only has clear playing function but also has voice amplification function.
Key words: VS1003b; disaster prevention; electroacoustic disaster alarm
Abstract: A real time data exchanging system is used in the amusement equipment running and controlling Base on CAN-bus. Introducing the CAN-bus techniques is applied to amusement equipment, the implement of the hardware and software, the implement of the data exchanging, an implement base on PIC24 Microcontroller with CAN module.
Key words: CAN-bus; amusement equipment; data exchanging; microcontroller
11-07-54 Research on Simulation Key Technology of Precision Operation Control of Manufacturing Process
WANG Sheng-long1, TANG Qiu-hua1, YI Lei1, WANG Juan2, LEI Zheng-qi2(1.Wuhan University of Science and Technology, College of
Mechanical and Automation, Wuhan 430081, China;2. Commercial Vehicle Engine Plant of Dongfeng Motor Co.,Ltd, Shiyan442000, China)
11-07-45 Design of Industrial Manipulator
LIU Shao-li(GuoFang Science and Technology Technician Institute of
Guangdong Province, Guangzhou510000)
Abstract: This article describes the design is industrial manipulator, including the machine designs, air pressure system designs and electricity control system designs. The manipulator is a cylinder coordinate which can hoist a 50 Newton maximum object, has four free degrees and is driven by air pressure system. Its functions include extension, elevation and subsidence of the arm, rotation of the wrist and grip of the finger. Since its work cycle is controlled by PLC, we can change its action sequence through revising the program.
Key words: industrial manipulator; design; project
11-07-47 Automatic Counting System Based on MCU
YING Yu-ming(Jinhua Polytechnic, Jinhua321017, China)
Abstract: With infrared transmitting and receiving module as sensor, when a workpiece passes through the surveyed area, the light will be blocked by the workpiece and the receiving module will emit a pulse signal, the counting for the passing workpiece just is the workpiece number. An on-line type automatic control photoelectric counter system is developed based on this photoelectric detection method. The experiments show that the instrument has the advantages of precision counting, fast detection speed and strong practicability.
Key words: photoelectric sensor; automatic counting; MCU
Abstract: Kanban management can eliminate unreasonable inventory during the production process, combine various stages of production and then it can significantly develop productivity and implement precision operational control of manufacturing process. Kanban, as the breakthrough point, constructs a simulation system of precise operational control during the manufacturing process; under the constraint of this system, manufacturing system simulation environment which consistent with the real process plant layout and technological process is generated based on Flexsim. Furthermore key Kanban program was developed by C++ language to ensure the simulation input of production instruction; and implement the global operations control of whole workshop and production sub-lines as well as precise operational control. Finally, the related examples demonstrate the effectiveness of this control measures.
Key words: production Kanban; manufacturing system modeling and simulation; manufacturing process control; lean production
11-07-58 Dynamic Characteristic Analysis for the Main Frame of Marine Tensioner
FANG Xiao-ming1, WANG Xiao-bo2, ZHONG Chao-ting2, ZENG Ming3, ZHANG Hong3(1.China National Offshore Oil Corp.,
Beijing100010, China; 2.Offshore Oil Engineering Co., Ltd, Tianjin300451, China; 3. College of Mechanical and Transportation Engineering, China University of Petroleum (Beijing),Beijing100000,China)
Abstract: The main frame of Marine Tensioner was researched. Using the finite element mode analysis method, the force mode of
61阅读请您转载分享:
61阅读请您转载分享:
五 : 带您了解机箱工业设计
优质机箱是PC配件安全的‘住所’,是让用户免受电磁辐射的屏障……那么,优质机箱如何选材加工?怎样设计散热方案?它对用户的各种个性化需求又是如何进行考虑的呢?机箱的工业设计是诞生一款优秀机箱产品的命脉。从材质的选择到加工的工艺,散热效能,结构设计和任一细节,直至最终的外观构思,将其完美融合在一起的整个流程就是机箱工业设计。Thermaltake(Tt)作为全球最顶尖的PC周边散热设备厂商之一, Tt以“优质于心,精致于形”为口号和追求,多年来为广大用户奉献了无数优秀的机箱产品,无论是另类酷炫的外观样式还是出色可靠的性能表现,Tt机箱总是能给我们带来许多惊喜,这也是Tt多年来一直所拥有的工业化设计优势。让我们一起来看看Tt是如何实现工业设计,打造出一件件堪称艺术品的机箱产品的吧。61阅读| 精彩专题| 最新文章| 热门文章| 苏ICP备13036349号-1