一 : 模拟飞行X新手攻略滑翔机教程
更多教程就在飞行小家www.cca3243.com
Tutorial 7: Introduction to Soaring
教程7:滑翔入门
想象一下像雄鹰一般在空中翱翔的感觉,是不是非常惬意?现在机会来了!在本次课冲中你将学会如何驾[www.61k.com)驶滑翔机——这是1种没有引擎的滑翔机型,而你要做的就是乘风而行(如果你以为滑翔就只能是越飞越低你可就错了,等着瞧吧)。本次可冲将在内华达州米恩丹的米恩丹托和机场(Minden-TahoeAirport,机场代号KMEV)开始。
你将由拖曳飞机带领升空,学会如何找到并运用热气流(Thermals,空气因为受热上升形成的上升气流)、山脊气流(Ridgelift,由于山脊存在将风抬向上方)、山峦波流(Wavelift,由于不断不断变化的高度造成的上升气流)在保持在空中飞行并飞越田野。在你向西飞到丹托湖之后,你即可调头回米恩丹托和机场降落了。
空速
由于你希望尽量降低滑翔机由于重力下降的趋势,控制空速就变得尤为重要,在本次课程中,你的控诉应该保持在:
热气流空速: 40-80节
巡航空速:100节
最大空速: 140节
下降空速: 80节以上
着陆速度: 60节

按CTRL+SHIFT+Y呼叫牵引机


起飞后稍微控制一下,不要让自己和牵引机偏离太多,似乎会扯断牵引的
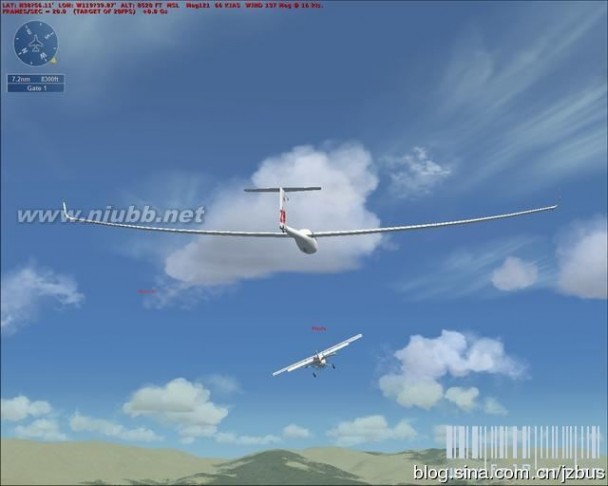
如果你技术够高,就随时断开牵引吧。按CTRL+Y?忘了……总之,对自己不是太自信的话,可以飞到8000FT左右再断掉牵引,这时你就已经处于上升气流区域内部了,在这里多练习下怎么利用气流吧。


滑翔机的任务很多人觉得苦手,其实是很简单的:很多人起飞后不久就失速掉了…滑翔机的操纵要点是“利用”上升气流,而不是单纯靠你的操纵来爬升高度:最简单的方法是在牵引升空后用升降舵配平把机头调整至略微上仰的姿态,然后剩余的飞行过程里只需要不断压杆让机头不要过度上仰,至于升力,空气自然会给你的。
未完待续。。。。。。
二 : 09121110-黄冯翔-四节传送带的模拟
CHANGZHOU INSTITUTE OF TECHNOLOGY
《电器与可编程控制器》课程设计说明书
题目:四节传送带的模拟
二级学院(直属学部): 延陵学院
专业: 电气工程及其自动化 班级: 09电Y3
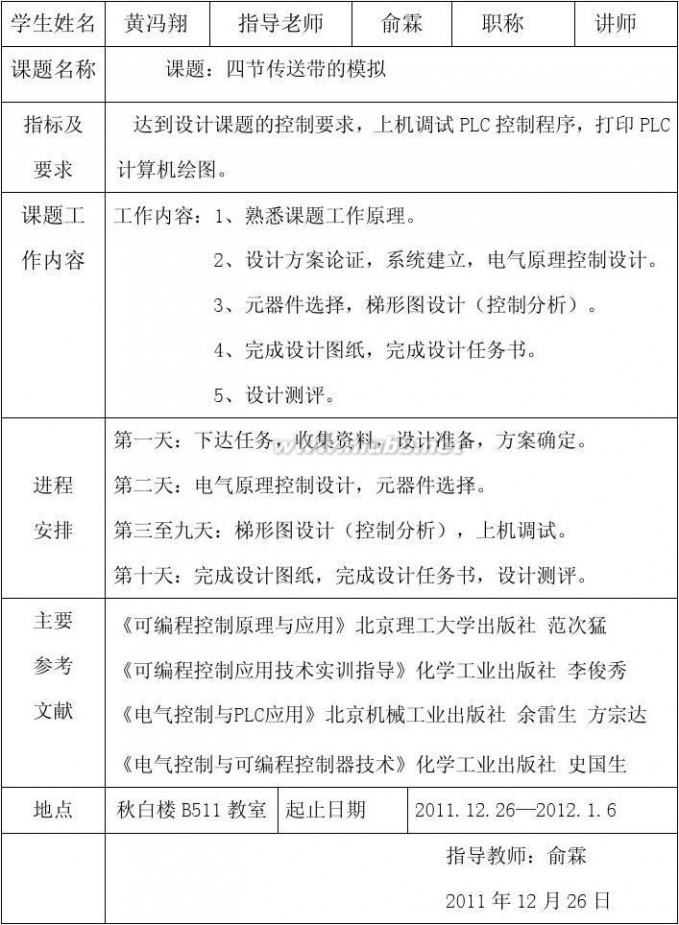
学生姓名: 黄冯翔 学号: 09121110
指导教师姓名: 俞霖 职称: 讲师
2011年 12月26日

冯翔 09121110-黄冯翔-四节传送带的模拟
《电器与可编程控制器》课程设计任务书 二级学院:延陵学院 专业:电气工程及其自动化 班级:09电Y3
冯翔 09121110-黄冯翔-四节传送带的模拟
目录
第一章 绪论 ................................................................... 1
第二章 课题介绍 ............................................................... 2
第三章 设计内容及要求 ......................................................... 3
第一节 控制要求 ............................................................. 3
第二节 设计要求 ............................................................. 3
第三节 控制原理及图示 ....................................................... 3
第四节 控制方案 ............................................................. 4
第四章 硬件设计 ............................................................... 5
第一节 元器件选择 ........................................................... 5
第二节 元器件清单 ........................................................... 7
第三节 硬件控制原理图 ....................................................... 7
第五章 软件设计 ............................................................... 8
第一节 设计思想及程序框图 ................................................... 8
第二节 I/O地址表 ......................................................... 10
第三节 程序设计与说明 ...................................................... 11
第六章 运行调试 .............................................................. 21
第一节 调试步骤 ............................................................ 21
第二节 调试过程 ............................................................ 21
第七章 总结 .................................................................. 23
参考文献: ................................................................... 24
附录: ....................................................................... 25
冯翔 09121110-黄冯翔-四节传送带的模拟
[www.61k.com)冯翔 09121110-黄冯翔-四节传送带的模拟
第一章 绪论
可编程序控制器(Programmable Controller)简称PC。[www.61k.com)个人计算机(Personal Computer)也称PC,为了避免混淆,人们将最初用于逻辑控制的可编程控制器叫做PLC (Programmable logic Controller)。
国际电工委员会(International Electrical Committee)在1987年颁布的PLC标准草案中对PLC作了如下定义:“PLC是一种专门为在工业环境下应用而设计的数字运算操作的电子装置。它采用可以编制程序的存储器,用来在其内部存储执行逻辑运算、顺序运算、定时、计数和算术运算等操作的指令,并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。PLC及其有关的外围设备都应按照易于与工业控制系统形成一个整体,易于扩展其功能的原则而设计。” PLC是微机技术与传统的继电接触控制技术相结合的产物,它克服了继电接触控制系统中的机械触点的接线复杂、可靠性低、功耗高等缺点,同时易学易用,便于维护,体积小,重量轻,特别是PLC的程序编制,不需要专门的计算机编程语言知识,而是采用了一套以梯形图为基础的简单指令形式,使程序编制形象、直观、方便易学。
在PLC诞生之前,工业控制设备的主流产品是以继电-接触控制系统为载体的控制装置。随着工业自动化程度的不断提高,使用纯电磁器件构成的工业控制系统的缺陷不断地暴露出来,加上当时电子技术,特别是微处理器方面,已经有了一定的发展,于是人们开始寻求一种以存储逻辑代替接线逻辑的新型工业控制设备,这就是我们现在所说的PLC。
相对于一般意义上的计算机,可编程控制器并不仅仅具有计算机的内核,它还配置了许多使其适用于工业控制的器件。自其诞生以来,它在很大程度上使得工业自动化设计从专业设计院走进了矿场企业,变成了普通工程技术人员甚至普通电气工人力所能及的工作。再加上其体积小、可靠性高、适应性强、安装接线简单等众多优点,可编程控制器在问世后的短短30年中获得了突飞猛进的发展。
1
冯翔 09121110-黄冯翔-四节传送带的模拟
第二章 课题介绍
17世纪中期,美国开始应用架空索道传送散状物料;19世纪中叶,各种现代结构的传送带输送机相继出现。(www.61k.com]
1868年,在英国出现了皮带式传送带输送机;1887年,在美国出现了螺旋输送机;1905年,在瑞士出现了钢带式输送机;1906年,在英国和德国出现了惯性输送机。此后,传送带输送机受到机械制造、电机、化工和冶金工业技术进步的影响,不断完善,逐步由完成车间内部的传送,发展到完成在企业内部、企业之间甚至城市之间的物料搬运,成为物料搬运系统机械化和自动化不可缺少的组成部分。
今天,工业生产中,传送带有着广泛的应用。本次设计即是利用三菱FX2NPLC及梯形图程
扩展:四节传送带的模拟控制 / 四节传送带的plc控制 / 四节传送带
序实现对四节传送带装置的模拟,实现四节传送带的顺次启动和停止、点动、长动、以及紧急故障处理等功能。
2
冯翔 09121110-黄冯翔-四节传送带的模拟
第三章 设计内容及要求
第一节 控制要求
有一个用四条皮带运输机的传送系统,分别用四台电动机带动,控制要求如下:
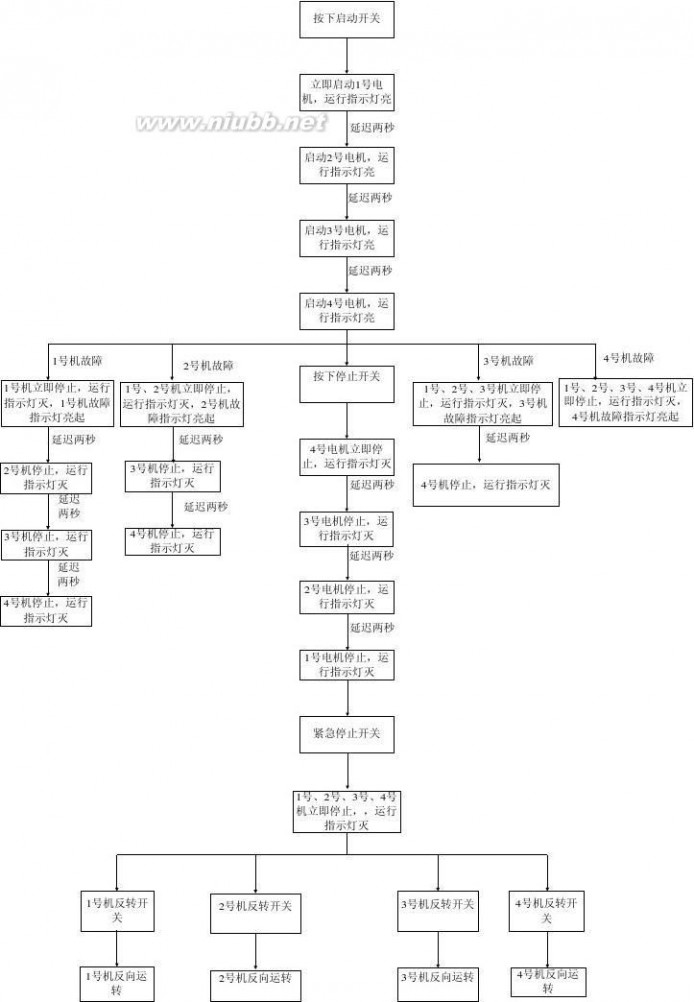
启动时先起动最末一条皮带机,经过2秒延时,再依次起动其它皮带机,处于正常运行状态的皮带机上运行指示灯长亮。[www.61k.com]
停止时应先停止最前一条皮带机,待料运送完毕后再依次停止其它皮带机。
当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,且该皮带机上运行指示灯熄灭,故障警示灯长亮。而该皮带机以后的皮带机待运完后才停止。例如M2故障,M1、M2立即停,经过2秒延时后,M3停,再过2秒,M4停。
发生紧急情况时,可按紧急停车按钮,M1、M2、M3、M4同时停车。
在皮带与工作平台之间出现较大位置误差时,可通过点动反转方式修正皮带位置。
第二节 设计要求
电路设计应在高性价比、高可靠性、低故障率的前提下,尽量简化,同时满足便于安装、维护,操作简单易懂等条件。还应考虑到合理的结构型式,安装方式的选择,相应的功能要求,响应速度要求,系统可靠性的要求,机型尽量统一等因素。
第三节 控制原理及图示
传送带控制面板及运行示意图
传送带A、B、C、D分别为第一、二、三、四级传送带,分别由四台电机M1、M2、M3、M4带动。常态下四条传送带均为顺时针方向运行,L1、L2、L3、L4
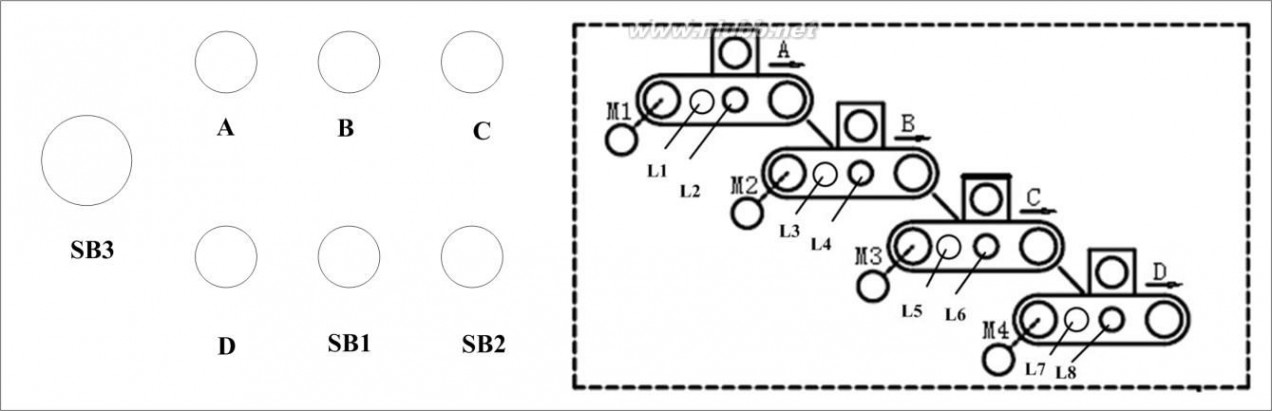
分别为四台传送带的运行指
3
冯翔 09121110-黄冯翔-四节传送带的模拟
示灯,L2、L4、L6、L8为故障指示灯,正常状态下运行指示灯长亮,遇到故障或紧急情况时熄灭,同时故障指示灯亮起,故障修复时熄灭。[www.61k.com)
控制面板中有7个按钮,A、B、C、D分别控制电机M1、M2、M3、M4的点动反转,SB1为启动开关,SB2为停止开关,SB3为紧急停止按钮。
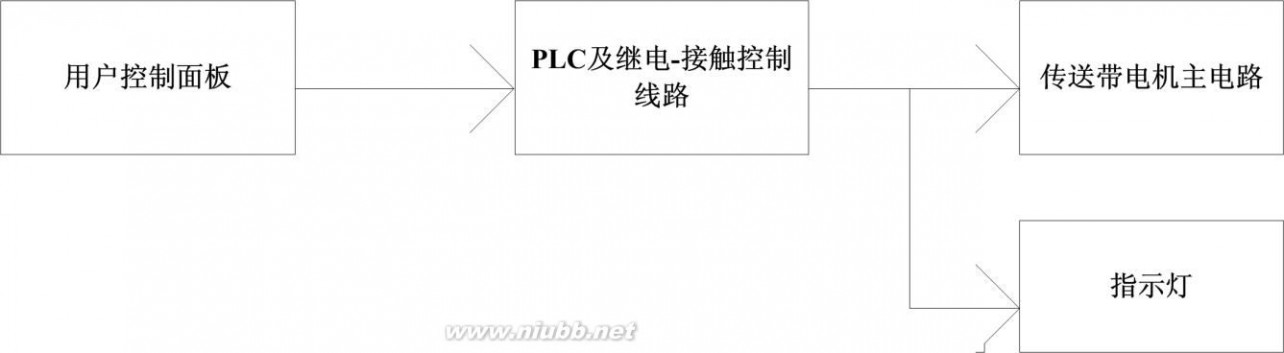
信号流程示意图
用户通过操作控制面板产生信号,经PLC及继电-解除控制系统处理后,产生相应控制信号,进而驱动电动机及指示灯的工作。
第四节 控制方案
采用PLC与传统继电-接触控制技术相结合的方式,将用户界面按钮开关的通断,经过处理后成为驱动主电路工作的控制信号,并将主电路工作状态以相同方式反馈到用户界面。用户操作面板采用开关控制,控制电路将PLC与继电器、接触器等电气元件相结合,主电路采用三相异步电动机作为工作机构,并以LED灯指示电路工作状态。
4
冯翔 09121110-黄冯翔-四节传送带的模拟
第四章 硬件设计
第一节 元器件选择
PLC型号的确定
PLC的选择应先考虑如下几个原则
(1)输入输出(I/O)点数的估算
I/O点数估算时应考虑适当的余量,通常根据统计的输入输出点数,再增加10%~20%的可扩展 余量后,作为输入输出点数估算数据。[www.61k.com)实际订货时,还需根据制造厂商PLC的产品特点,对输入输出点数进行圆整。
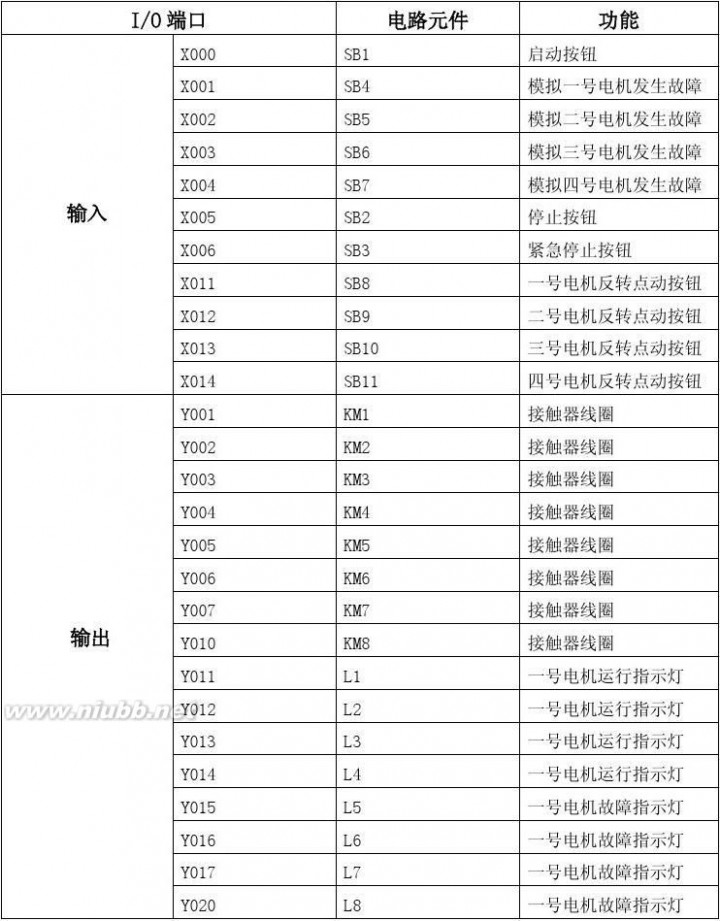
本设计中共有输入触点10个,输出触点16个。
2、存储器容量的估算
存储器容量是可编程序控制器本身能提供的硬件存储单元大小,程序容量是存储器中用户应用项目使用的存储单元的大小,因此程序容量小于存储器容量。本设计中,梯形图指令共152步。
3、对PLC响应时间的要求
响应速度即响应时间包括输入滤波时间,输出滤波时间和扫描周期。PLC一般以顺序扫描工作方式进行工作,对小于扫描时间的输入信号,有可能造成接收信号不可靠。因此,对有维持很短时间的输入信号来讲,需要选取扫描速度高的PLC。一般机器对扫描时间的限定值为100~200ms,而实际上执行一千条指令仅需时间1~10ms ,对一般规模的PLC程序,则输入信号能维持在10ms左右就完全能安全地被接收到,但对模拟量输入则需要考虑与PLC的响应时间的配合问题。
4、系统可靠性
根据生产环境及工艺要求,应采用功能完善可靠性适宜的PLC。对可靠性要求极高的系统,应考虑是否采用冗余控制系统或热备份系统。
5、编程器与外围设备
小型PLC控制系统一般选用价格便宜的简易编程器;如果系统较大或多台PLC共用,可以选用功能强,编程方便的图形编辑器;如果有现成的个人计算机,可选用能在计算机上使用的编程软件。
故设计中采用三菱FX2NPLC,其基本规格如下: 电源·输入输出
电源规格AC 电源型:AC100V~240V DC 电源型:DC24V
耗电量AC 电源型:30VA(16M),40VA(32M),50VA(48M),60VA(64M),70VA(80M),
5
冯翔 09121110-黄冯翔-四节传送带的模拟
100VA(128M)
DC 电源型:25W(32M),30W(48M),35W(64M),40W(80M)
冲击电流AC 电源型:最大40A 5ms 以下/AC100V, 最大60A 5ms 以下/AC200V 24V 供电电源AC 电源型:250mA 以下(16M,32M) 460mA 以下(48M,64M,80M,128M)
输入规格DC 输入型:DC24V 7mA/5mA 无电压触点、或者NPN 开集电极晶体管输入AC 输入型:AC100~120V AC 电压输入
输出规格 继电器输出型:2A/1 点、8A/4 点COM 8A/8 点COM AC250V,DC30V 以下
晶体管输出型:0.5A/1 点(Y000、Y001 为0.3A/1 点)、0.8A/4 点COM DC5V~DC30V 晶闸管输出:0.3A/1 点,0.8A/4 点公共,AC85 ~ 242V
输入输出扩展 可连接FX2N 系列用的扩展模块以及FX2N 系列用的扩展单元。[www.61k.com) 性能程序内存 内置8,000 步RAM( 电池支持)、注释输入、可RUN 中写入;安装有存储盒时最大可扩展到16,000 步
时钟功能内置实时时钟( 有时间设定指令、时间比较指令,具有闰年修正功能) 指令 基本指令27 个、步进梯形图指令2 个、应用指令132 种
运算处理速度基本指令:0.08μs/ 指令,应用指令:1.52~ 数100μs
扩展:四节传送带的模拟控制 / 四节传送带的plc控制 / 四节传送带
高速处理 有输入输出刷新指令、输入滤波调整指令、输入中断功能、定时中断功能、计数中断功能、脉冲捕捉功能
最大输入输出点数256 点
辅助继电器、定时器辅助继电器:3,072 点、定时器:256 点
计数器 一般用16 位增计数器:200 点,一般用32 位增减计数器:35 点高速用32 位增计数·减计数器:[1 相]60kHz/2 点、10kHz/4 点 [2 相]30kHz/1 点、5kHz/1 点
数据寄存器 一般用8,000 点、变址用16 点、文件用在程序区域中最多可设定到7,000 点
其它模拟电位器通过FX2N-8AV-BD 型的功能扩展板,可扩展8 点
功能扩展板可以安装FX2N- □□□ -BD 型功能扩展板
特殊适配器可以通过FX2N-CNV-BD 连接
特殊扩展可连接FX0N、FX2N 系列的特殊单元以及特殊模块。 显示模块可外装FX-10DM(也可以直接连接GOT,ET 系列人机界面) 对应数据通信 对应数据链接 RS-232C、RS-485、RS-422、N:N 网络、并联链接、计算机链接 CC-Link、CC-Link/LT、MELSEC-I/O 链接
外围设备的机型选择选择「FX2N(C)」或「FX2(C)」。但是选择「FX2(C)」时使用有限制。
6
冯翔 09121110-黄冯翔-四节传送带的模拟


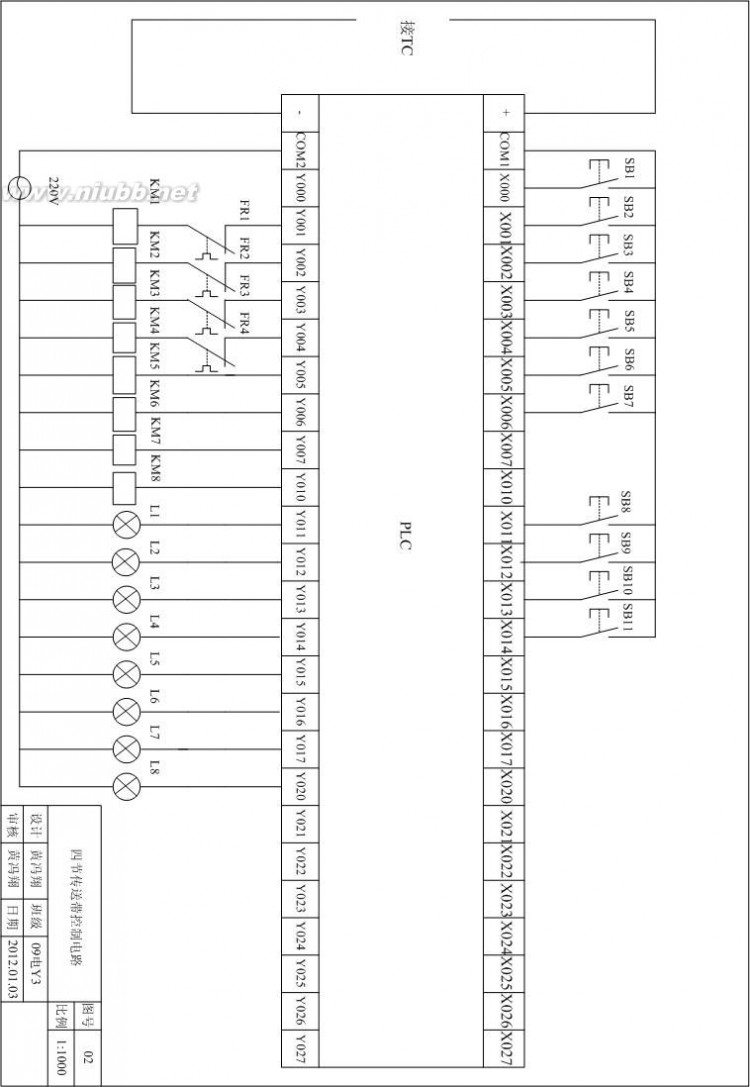
第三节 硬件控制原理图
冯翔 09121110-黄冯翔-四节传送带的模拟
第五章 软件设计
第一节 设计思想及程序框图
分配好I/O地址表以后,PLC机参照自身存储的程序,依次扫描所对应的触点,根据触点所处状态输出相应信号,从而控制电路中其他控制器件的动作,并最终控制主电路的工作。(www.61k.com)
程序框图如下:
8
冯翔 09121110-黄冯翔-四节传送带的模拟
9
冯翔 09121110-黄冯翔-四节传送带的模拟
10
冯翔 09121110-黄冯翔-四节传送带的模拟
第三节 程序设计与说明
指令表如下:
11
冯翔 09121110-黄冯翔-四节传送带的模拟
12
冯翔 09121110-黄冯翔-四节传送带的模拟
13
冯翔 09121110-黄冯翔-四节传送带的模拟
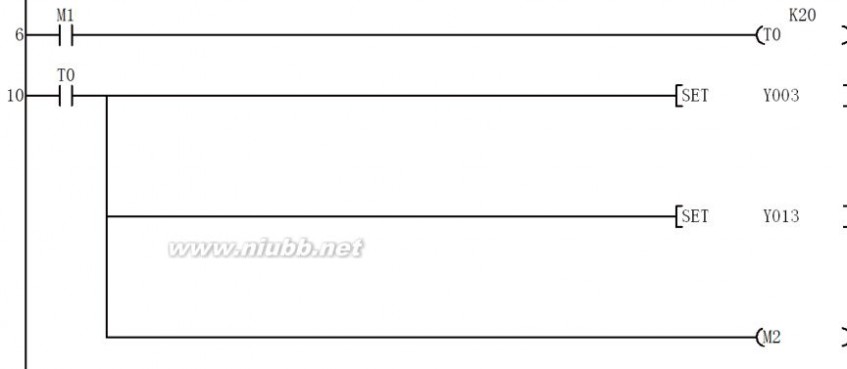
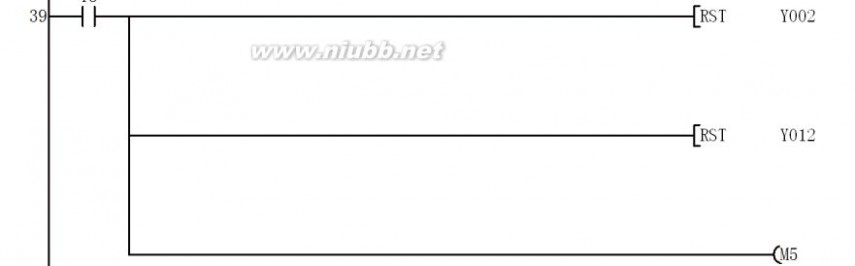
梯形图及注释:
按下启动按钮SB1,X000接通,M1线圈得电自锁,Y004与Y014置1,四号电机立即启动,L1常亮。(www.61k.com)
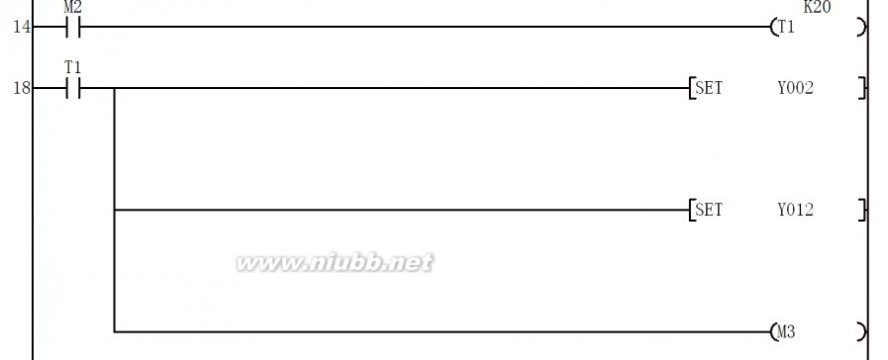
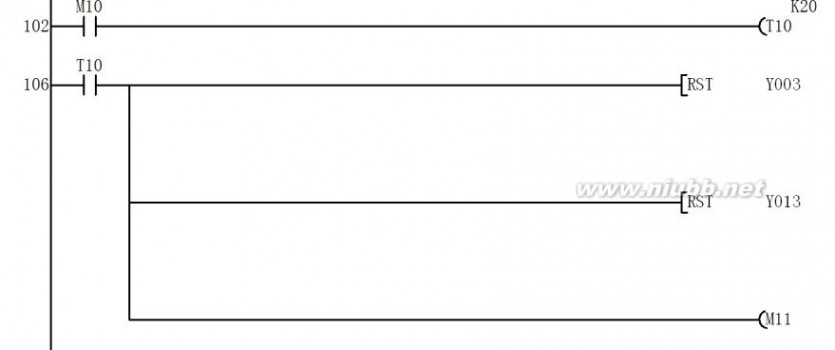
2秒后T0得电,Y003,Y013置1,三号电机启动,L2常亮。
2秒后T1得电,Y002,Y012置1,二号电机启动,L3常亮。
2秒后T2得电,Y001,Y011置1,一号电机启动,L4常亮。


14
冯翔 09121110-黄冯翔-四节传送带的模拟
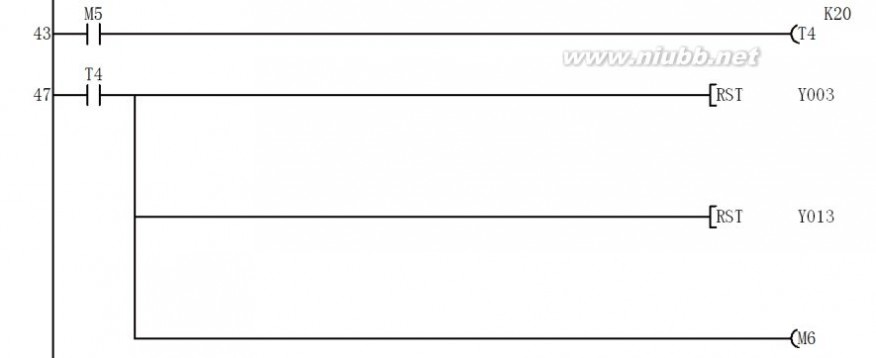
按下停止按钮SB2,X005接通,Y001,Y011置0,一号电机立即停止运行,L1熄灭。[www.61k.com)
2秒后,T3得电,Y002,Y012置0,二号电机停止运行,L2熄灭。
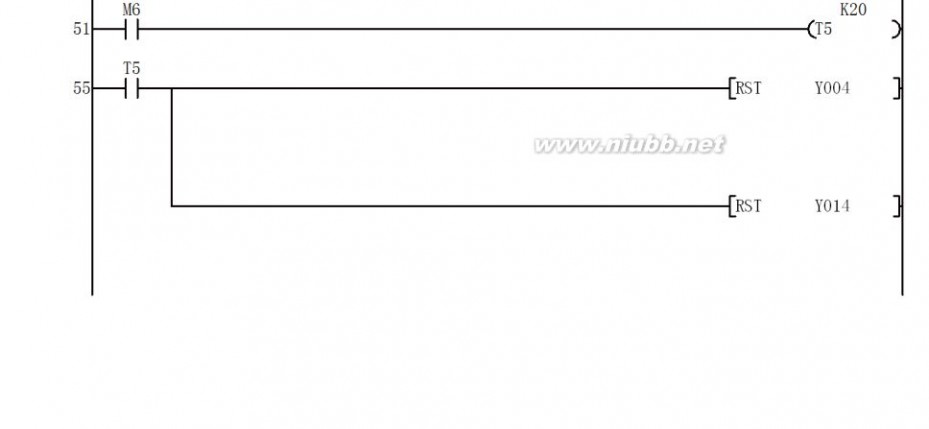
2秒后,T4得电,Y003,Y013置0,三号电机停止运行,L3熄灭。
2秒后,T5得电,Y004,Y014置0,四号电机停止运行,L4熄灭。

15
冯翔 09121110-黄冯翔-四节传送带的模拟
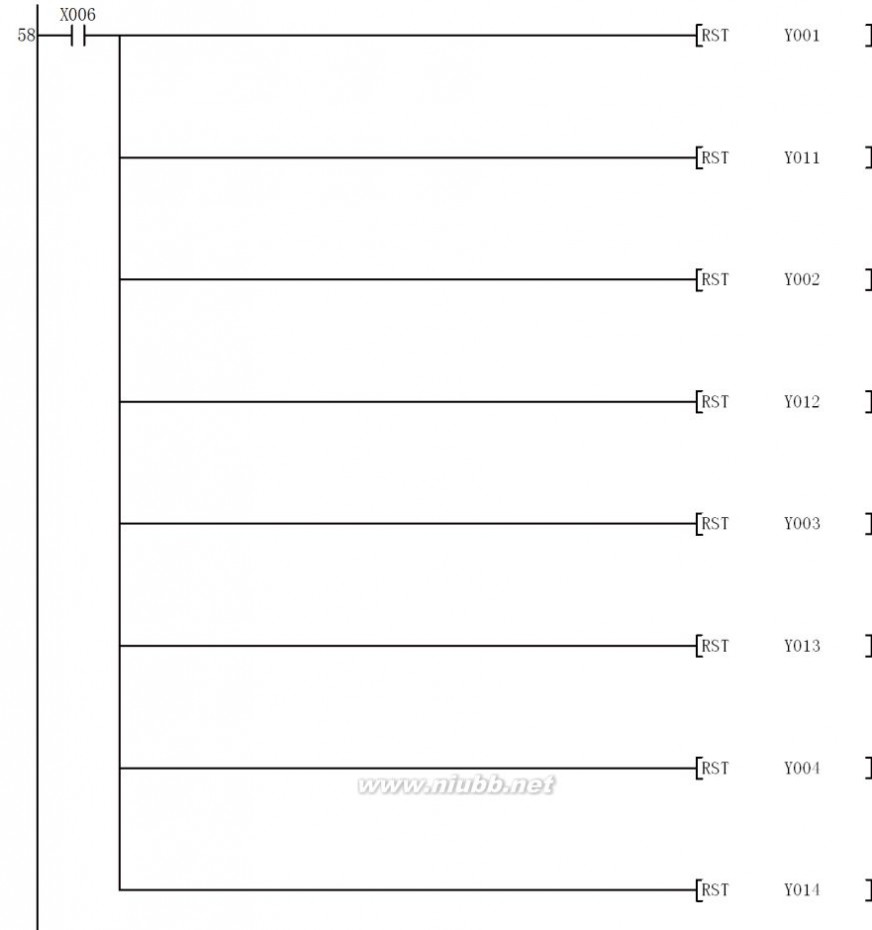
按下紧急停止按钮SB3,Y001,Y011,Y002,Y012,Y003,Y013,Y004,Y014置0,四台电机同时立即停止运行,L1、L2、L3、L4也都熄灭。[www.61k.com)
按下一号电机故障模拟按钮SB4,Y001,Y011置1,Y015置1,一号电机立即停止运行,L1熄灭,L5常亮。
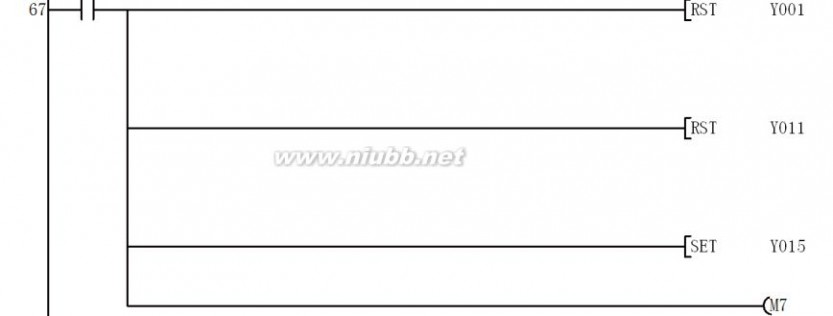
16
冯翔 09121110-黄冯翔-四节传送带的模拟
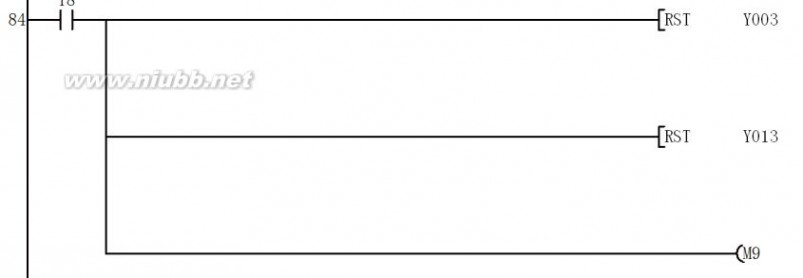
2秒后,T7得电,Y002,Y012置0,二号电机停止运行,L2熄灭。[www.61k.com)
2秒后,T8得电,Y003,Y013置0,三号电机停止运行,L3熄灭。
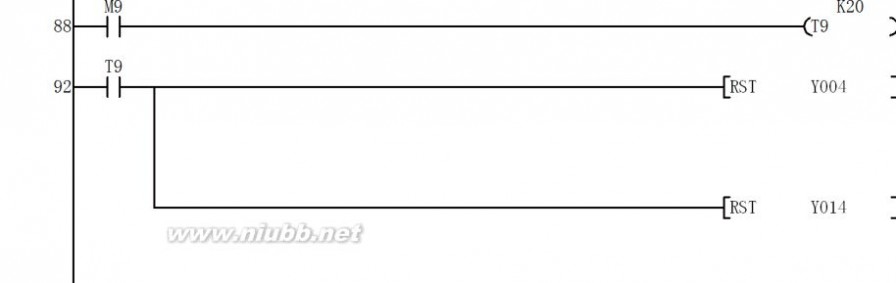
2秒后,T9得电,Y004,Y014置0,四号电机停止运行,L4熄灭。
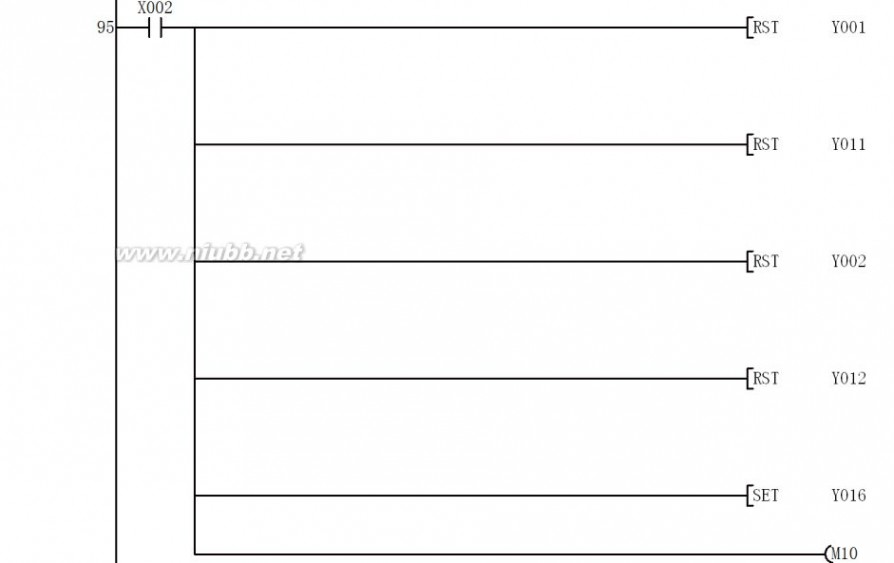
按下2号电机故障模拟按钮SB5,Y001,Y011,Y002,Y012置0,Y016置1,一号、二号电机立即停止运行,L1、L2熄灭,L6常亮。

扩展:四节传送带的模拟控制 / 四节传送带的plc控制 / 四节传送带
17
冯翔 09121110-黄冯翔-四节传送带的模拟
2秒后T10得电,Y003,Y013置0,三号电机停止运行,L3熄灭。(www.61k.com)
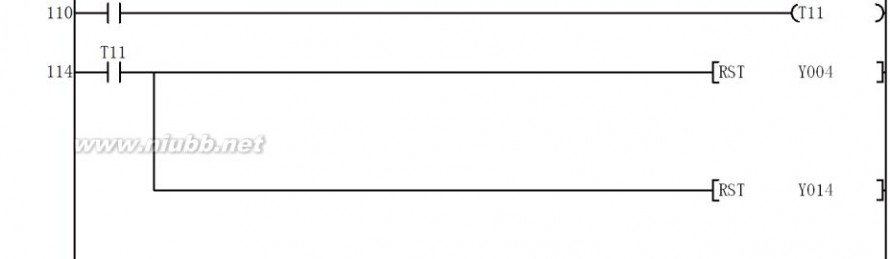
2秒后T11得电,Y004,Y014置0,四号电机停止运行,L4熄灭。
按下三号电机故障模拟按钮SB6,Y001,Y011,Y002,Y012,Y003,Y013置0,Y017置1,一号、二号、三号电机立即停止运行,L1、L2、L3熄灭,L7常亮。

18
冯翔 09121110-黄冯翔-四节传送带的模拟
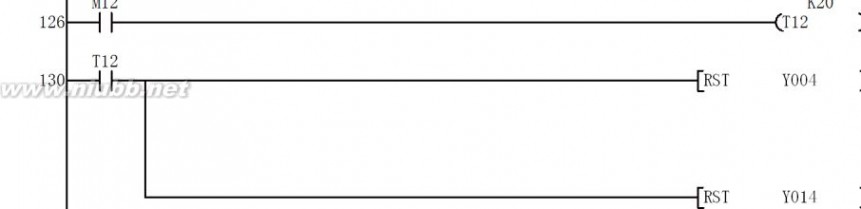
2秒后T12得电,Y004,Y014置0,四号电机停止运行,L4熄灭。(www.61k.com)
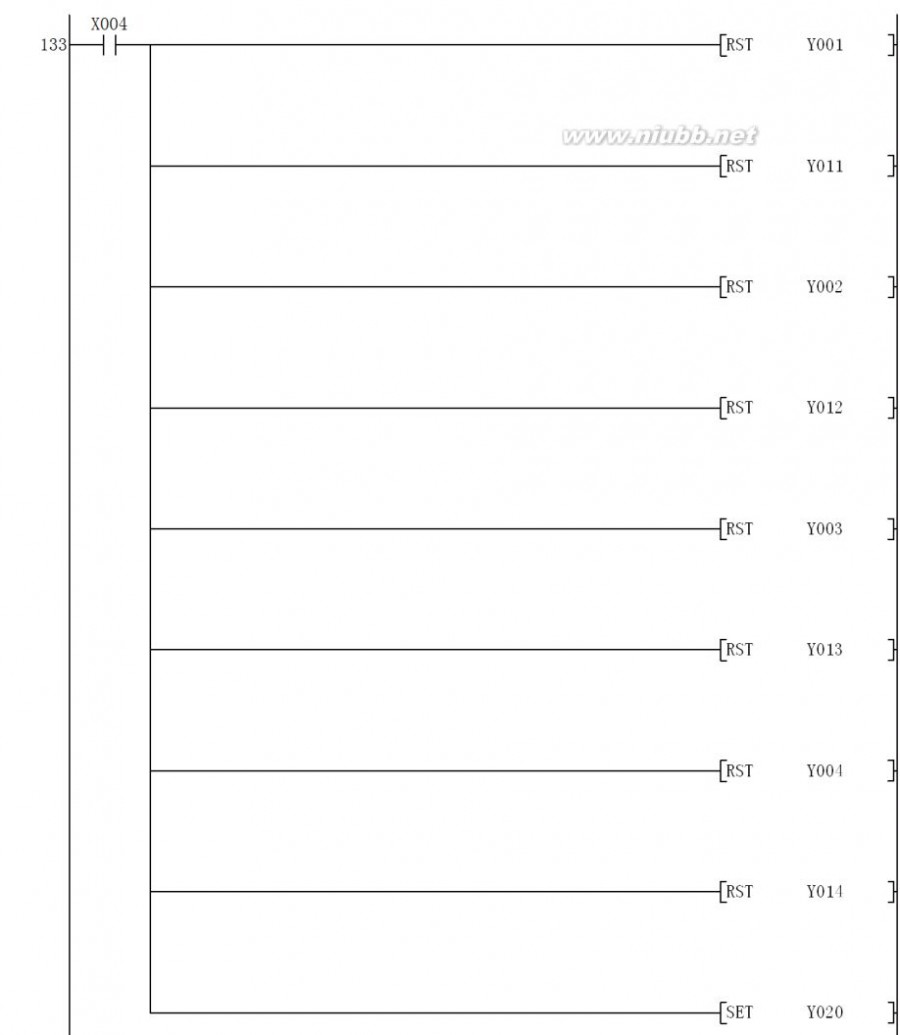
按下四号电机故障模拟开关SB7,Y001,Y011,Y002,Y012,Y003,Y013,Y004,Y014置0,Y020置1,四台电机同时立即停止运行,L1、L2、L3、L4熄灭,L8常亮。
按下一号电机点动反转按钮SB8,一号电机立即反向运转,松开SB8,一号电机立即停止运转。
按下二号电机点动反转按钮SB9,二号电机立即反向运转,松开SB9,二号电机立即停止运转。


19
冯翔 09121110-黄冯翔-四节传送带的模拟
按下三号电机点动反转按钮SB10,三号电机立即反向运转,松开SB10,三号电机立即停止运转。[www.61k.com)
按下四号电机点动反转按钮SB11,四号电机立即反向运转,松开SB11,四号电机立即停止运转。
程序结束,开始下一个周期。



20
冯翔 09121110-黄冯翔-四节传送带的模拟
第六章 运行调试
第一节 调试步骤
1.在GX Dev3eloper软件中编写梯形图程序。(www.61k.com]
2.将PLC机与各个电路元件按照电气图连接起来。
3.用数据线将计算机与PLC机相连接。
4.将PLC机开关拨向STOP,确认程序无误后,输入PLC中的存储器。
5.数据传输完毕后,将PLC开关拨向RUN,开始模拟。
第二节 调试过程
1.正常启动、停止
按下启动按钮SB1,四号电机先启动,两秒后,三号、二号、一号电机以2秒为间隔依次启动,电机启动的同时,相应的运行指示灯也随之亮起。按下停止按钮SB2,一号机先停止,两秒后,二号、三号、四号机同样以2秒为间隔依次停止。电机停车的同时,相应的运行指示灯也随之熄灭。
2.紧急制动
按下启动按钮X000,四台电机先后启动,按下紧急制动按钮SB3,四台电机同时立即停车,同时四盏运行指示灯均熄灭。
3.故障模拟
正常启动四台电机,按下一号机故障模拟开关SB4,一号机立即停止,L1熄灭,L5亮起, 2秒后二号机停止,L2灭,,再经2秒,三号机停止,L3灭,再过2秒,四号电机停止,L4灭。 正常启动四台电机,按下二号机故障模拟开关SB5,一号机、二号机立即停止,L1、L2熄灭,L6亮起, 2秒后三号机停止,L3灭,再经2秒,四号机停止,L4灭。
正常启动四台电机,按下三号机故障模拟开关SB6,一号机、二号机、三号机立即停止,L1、L2、L3熄灭,L7亮起, 2秒后四号机停止,L4灭。
正常启动四台电机,按下四号机故障模拟开关SB7,四台电机均立即停止,L1、L2、L3、L4熄灭,L8亮起。
4.点动反转模拟
在四台电机均处于停止状态时,按下一号机点动反转按钮SB8,一号电机反向运转,松开按钮后停止运转,按下二号机点动反转按钮SB9,二号电机反向运转,松开按钮后停止运转。
21
冯翔 09121110-黄冯翔-四节传送带的模拟
按下三号机点动反转按钮SB10,三号电机反向运转,松开按钮后停止运转,按下四号机点动反转按钮SB11,四号电机反向运转,松开按钮后停止运转。[www.61k.com]
22
冯翔 09121110-黄冯翔-四节传送带的模拟
第七章 总结
这次的课程设计使我对电气控制技术有了更加全面和深入的了解,在对四节传送带的模拟中,了解了PLC在具体实例中的应用,同时也深化了对传统控制技术的掌握。[www.61k.com)在这次课程设计中,我学到很多很多的东西,特别是对时间的规划和分配,同时也知道了电气设计所要经历的流程。通过这次课程设计使我懂得了理论与实际相结合是很重要的,只有理论知识是远远不够的,实践方能出真知,只有独立的去发现问题,分析问题,并解决问题,才能真正提高自己的实际动手能力和独立思考的能力。
整整两个星期,从构思到行动,从设计电路图,到编写程序,从无从下手到驾轻就熟,再到报告的完成,这一过程对我来说,虽然艰辛,但也让我感到了别样的充实和从未有过的成就感。通过此次编程使我的能力得到了加强,也培养了我思考问题的全面性。经过这个毕业设计,我也从中发现不少平时没注意的问题,学习理论知识固然重要,实践更重要,我们应该做到理论与实践相结合。由于我的知识水平有限,电路的设计肯定还存在着许多的缺点和不足,还希望老师给与批评和指点。
扩展:四节传送带的模拟控制 / 四节传送带的plc控制 / 四节传送带
23
冯翔 09121110-黄冯翔-四节传送带的模拟
参考文献:
《可编程序控制器原理及应用系统设计技术》. 北京:冶金工业出版社,2001
陈在平、赵相宾主编,《可编程序控制器技术与应用系统设计》. 北京:机械工业出版社
郑晟、巩建平、张学编著. 《现代可编程序控制器原理与应用》. 北京:科学出版社 谢克明、夏路易主编. 《可编程序控制器与程序设计》. 北京:电子工业出版社 宣练中、王燕生等编. 《可编程序控制器及其应用》. 北京:机械工业出版社
《电气工程师手册》第二版编辑委员会编. 《电气工程师手册》(第二版). 北京:机械工业出版社,2000
24
冯翔 09121110-黄冯翔-四节传送带的模拟
附录:
25
冯翔 09121110-黄冯翔-四节传送带的模拟
26
扩展:四节传送带的模拟控制 / 四节传送带的plc控制 / 四节传送带
三 : 利用废弃品打造滑翔机飞机模型
巧妙地对家里的废品进行搭配利用,不但能手工自制出许许多多实用的家庭用品,还可以为孩子们打造出各种各样的玩具飞机模型。今天51费宝通过借助保鲜膜纸芯以及用过的包装纸盒,给大家带来一个适合小学生手工制作的diy滑翔机模型的做法。
(www.61k.com。
利用废旧物品diy滑翔机模型需要的材料:保鲜膜纸筒或者卷筒纸芯、废弃的包装盒、胶带、一次性杯子、废吸管、剪刀、铅笔、直尺。按照教程来源# @! R! ?& A" G49.77.206.72 未经书面授权 请勿转载51费宝网diy步骤当中的图片示范,一起来把这个废旧改造的diy飞机加入到你的小学生手工制作作品大全的收集当中吧。
1、准备我们前面列举的材料,让做出来的滑翔机模型更加帅气,建议大家选用颜色光线的胶带作为粘结介质。

2、用剪刀把纸芯侧面挖空一个小洞作为驾驶舱入口,纸芯的末端,如图所示剪下三个互相垂直的榫口,用于插入尾翼。尾翼是通过把材料当中的包装盒剪开后,将相应的纸板用胶带粘成的。

3、继续利用包装盒上剪下来的纸板制作滑翔飞机模型的机翼及机翼支撑架。

4、利用合适口径的一次性杯子作为飞机头,用热熔胶把机头和螺旋桨(硬纸板)粘在纸芯的另外一端。

5、按照前面步骤已经把一架简单的diy滑翔机模型做好了,如果要让它从外观看起来更加帅气,追求完美的孩子们不妨利用贴纸或者喷漆把飞机机身装扮的更加逼真和专业。
61阅读| 精彩专题| 最新文章| 热门文章| 苏ICP备13036349号-1