一 : 温度控制系统设计
武汉理工大学《计算机控制技术》课程设计说明书
课程设计任务书
学生姓名: 郑子茗 专业班级: 自动化1101班
指导教师: 周申培 工作单位: 自动化学院
题 目: 温度控制系统设计
初始条件:
被控对象为电炉,采用热阻丝加热,利用大功率可控硅控制器控制热阻丝两端所加的电压大小,来改变流经热阻丝的电流,从而改变电炉炉内的温度。可控硅控制器输入为0~5伏时对应电炉温度0-300℃,温度传感器测量值对应也为0~5伏,对象的特性为带有纯滞后环节的一阶系统,惯性时间常数为T1=30秒,滞后时间常数为τ=10秒。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)
1.设计温度控制系统的计算机硬件系统,画出框图;
2.编写积分分离PID算法程序,从键盘接受Kp、Ti、Td、T及β的值;
3.计算机仿真被控对象,编写仿真程序;
4.通过数据分析T改变时对系统超调量的影响。
5. 撰写设计说明书。课程设计说明书应包括:设计任务及要求;方案比较及认证;系统滤波原理、硬件原理,电路图,采用器件的功能说明;软件思想,流程,源程序;调试记录及结果分析;参考资料;附录:芯片资料,程序清单;总结。
时间安排:
6月25日 查阅和准备相关技术资料,完成整体方案设计
6月26日—6月27日 完成硬件设计
6月30日—7月1日 编写调试程序
7月2日—7月3日
7月4日 撰写课程设计说明书 提交课程设计说明书、图纸、电子文档
指导教师签名: 年 月 日
系主任(或责任教师)签名: 年 月 日
武汉理工大学《计算机控制技术》课程设计说明书
摘要
随着科学技术的迅猛发展,各个领域对温度控制系统的精度、稳定性等要求越来越高,控制系统也千变万化。电阻炉广泛应用于各行各业, 其温度控制通常采用模拟或数字调节仪表进行调节,但存在着某些固有的缺点。而采用单片机进行炉温控制,可大大地提高控制质量和自动化水平, 具有良好的经济效益和推广价值。
本设计以89C51单片机为核心控制器件,以ADC0809作为A/D转换器件,采用闭环直接数字控制算法,通过控制可控硅来控制热电阻,进而控制电炉温度,最终设计了一个满足要求的电阻炉微型计算机温度控制系统。
关键字:电阻炉 89C51单片机 温度控制 A/D转换
武汉理工大学《计算机控制技术》课程设计说明书
目录
1 设计任务及分析.................................................... 1
2 方案设计.................................................................................................................... 2
3总的设计..................................................................................................................... 3
3.1 软件流程图...................................................................................................... 3
3.2 总的硬件设计................................................................................................. 4
4 积分分离PID控制.................................................................................................... 5
4.1 PID控制度的作用 ........................................................................................... 5
4.2 积分分离判断.................................................................................................. 5
4.3 PID控制算法 ................................................................................................ 7
5 系统仿真.................................................................................................................... 9
5.1 仿真程序及图形设计...................................................................................... 9
5.2 仿真结果........................................................................................................ 10
心得体会......................................................................................................................14
参考文献......................................................................................................................15
程序清单......................................................................................................................16
武汉理工大学《计算机控制技术》课程设计说明书
温度控制系统设计
1 设计任务及分析
被控对象为电炉,采用热阻丝加热,利用大功率可控硅控制器控制热阻丝两端所加的电压大小,来改变流经热阻丝的电流,从而改变电炉炉内的温度。可控硅控制器输入为0-5伏时对应电炉温度0-300℃,温度传感器测量值对应也为0-5伏,对象的特性为带有纯滞后环节的一阶系统,惯性时间常数为T1=30秒,滞后时间常数为τ=10秒。
要求完成的任务
1)设计温度控制系统的计算机硬件系统,画出框图;
2)编写积分分离PID算法程序,从键盘接受Kp、Ti、Td、T及β的值;
3)通过数据分析T改变时对系统超调量的影响。
4)撰写设计说明书。
本次设计是对电炉的温度控制,而电炉的温度是通过放在其中的热阻丝来控制的,而热阻丝的电流由可控硅控制器控制热阻丝两端所加电压来控制。对电炉温度的控制是个动态的过程,不可能一下子就达到我们想要的温度,需要用到一些仪器比如热电偶来测量电路的温度,通过传感器将炉温转换成电压信号,送入A/D转换器,通过采样和模数转换,所检测到的电压信号和炉温给定值的电压信号送入计算机程序中作比较,得出给定值与实际值之间的偏差,单片机对偏差进行运算,将运算结果送给晶闸管调压器来调节热阻丝的电流,以此来调节电电炉的温度。
1
武汉理工大学《计算机控制技术》课程设计说明书
2 方案设计
电炉的温度控制是个动态的控制过程,需要借助计算机,单片机等很多器件的硬件连接来实现。而电炉温度的直接控制是通过热阻丝的加热来实现的,热阻丝的加热是由流经热阻丝的电流老控制的,而热阻丝的电流是通过可控硅控制器控制热阻丝两端所加电压来控制,电压的调节是通过可控制硅控制。需要用到热电偶时刻监测电炉的温度,通过传感器将温度信号转化为电压信号,而电压信号通过模数转换送入到计算机进行控制,计算机将转换结果送到晶闸管来控制加到热阻丝两端的电压,这样达到调节电炉温度的目的。
电炉温度控制的硬件连接图如图2-1所示
图2-1 温度控制系统框图

2
武汉理工大学《计算机控制技术》课程设计说明书
3 总的设计
3.1 软件流程图
软件流程图如图3-1所示

图3-1 软件流程图
3
武汉理工大学《计算机控制技术》课程设计说明书
通过一个温度传感器将电炉中的温度转换成电压信号,计算机采集这个电压信号,经过数模转换器求出温度值,将计算出的温度值与目标温度值进行比较,求出偏差,将偏差与预先设定的偏差进行比较,选择是用PID控制还是PD控制,计算机处理的结果输出控制可控硅的调节,又可控硅来调节加在电炉中热阻丝两端的电压来调节电炉的温度。然后再次测量电炉温度,反复测量,反复调节,最终达到目标温度。
3.2 总的硬件设计
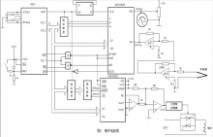
图3-2 硬件设计图
4
武汉理工大学《计算机控制技术》课程设计说明书
4 积分分离PID控制
4.1 PID控制度的作用
比例调节作用(P):是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的有比较大的超调,并产生振荡,稳定性下降,甚至造成系统的不稳定。
积分调节作用(I):是使系统消除稳态误差,它能对稳定后有累积误差的系统进行误差修整,提高无差度。因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。积分作用的强弱取决与积分时间常数Ti,Ti 越小,积分作用就越强。反之Ti 大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另两种调节规律结合,组成PI 调节器或PID 调节器。
微分调节作用(D):微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。因此,可以改善系统的动态性能。在微分时间选择合适情况下,可以减少超调,减少调节时间。微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD 或PID 控制器。
4.2 积分分离判断
在一般的PID控制中,当有较大的扰动或大幅度改变给定值时,由于此时有较大的偏差,以及系统有惯性和滞后,故在积分项的作用下,往往会产生较大的超调和长时间的波动。特别对于温度等变化缓慢的过程,这一现象更为严重,为此,可采用积分分离措施,即偏差e(k)较大时,取消积分作用;当偏差较小时才将积分作用投入。亦即
5
武汉理工大学《计算机控制技术》课程设计说明书
当e(k)??时,采用PD控制;
当e(k)??时,采用PID控制。
积分分离阈值?应根据具体对象及控制要求。若?值过大时,则达不到积分分离的目的;若?值过小,则一旦被控量y(t)无法跳出个积分分离区,只进行PD控制,将会出现残差,为了实现积分分离,编写程序时必须从数字PID差分方程式中分离出积分项,进行特殊处理。
积分分离PID控制算法图如图4-1所示

图4-1 积分分离PID控制算法图
6
武汉理工大学《计算机控制技术》课程设计说明书
4.3 PID控制算法
实际运行的经验和理论的分析都表明,运用这种控制规律对许多工业过程控制时,都能得到满意的效果。不过用计算机实现PID控制,不是简单得把模拟PID控制规律数字化,而是进一步与计算机的逻辑判断功能结合,使PID控制更加灵活,更能满足生产过程提出的要求。
PID算法推倒如下:
u(t)?Kp[e(t)?
u:调节器的输出信号;
e:偏差信号;
K:调节器的比例系数;
TI:调节器的积分时间;
TD:调节器的微分时间。 1TI?t0e(t)dt?TDde(t)] dt
对应的模拟PID调节器的传递函数
D(S)?U(s)1?KP(??TDS
E(s)TIS)
PP P 其中K为比例增益,K与比例带?成倒数关系即K=1/?,TI为积分时间常数,
TD为微分时间常数,u(t)为控制量,e(t)为偏差。
在计算机控制中,为实现数字控制,必须对式上式进行离散化处理。用数字形式的差分方程代替连续系统的微分方程。设系统的采样周期为T,在t=kT时刻进行采样,
?e(t)dt??Te(i) 0i?0tk
de(t)e(k)?e(k?1)? dtT
式中e(k):根据本次采样值所得到的偏差;
e(k-1):由上次采样所得到的偏差。
T为采样周期
K为采样序号
由以上可得:
7
武汉理工大学《计算机控制技术》课程设计说明书
Tu(k)?Kp[e(k)?TI?TD?e(i)i?0
kke(k)?e(k?1)]T
?Kpe(k)??ki?e(i)?kd
i?0e(k)?e(k?1)T
式中,T为采样时间,?项为积分项的开关系数
????0?
?1e(k)??e(k)??
8
武汉理工大学《计算机控制技术》课程设计说明书
5系统仿真
5.1 仿真程序及图形设计
被控对象为:
G(S)=e?10S/(1+30S)
采用simulink仿真,通过simulink模块实现积分分离PID控制算法。 选择合适的Kp,Ki,Kd是系统的仿真效果趋于理想状态。MATLAB编写程序
如下:
clear all;
close all;
ts=2; %采样时间2s
sys=tf([1],[30,1],'inputdelay',10);
dsys=c2d(sys,ts,'zoh'); %将sys离散化
[num,den]=tfdata(dsys,'v'); %求sys多项式模型参数
仿真图形设计如图
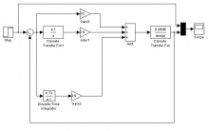
5-1
图5-1 simulink仿真图
9
武汉理工大学《计算机控制技术》课程设计说明书
5.2 仿真结果
选择不同的采样周期T会得出不同的仿真图形,下面对不同T情况下的仿真结果简单介绍下。
T=0.1s时仿真图形如图5-2所示
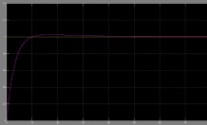
图5-2 仿真图
10
武汉理工大学《计算机控制技术》课程设计说明书
T=0.5s时仿真图形如图5-3所示

图5-3 仿真图
T=1s时仿真图形如图5-4所示
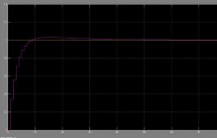
图5-4 仿真图 11
武汉理工大学《计算机控制技术》课程设计说明书
T=2s时仿真图形如图5-5所示

图5-5 仿真图 T=3s时仿真图形如图5-6所示
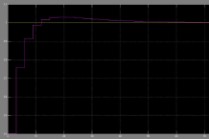
图5-6 仿真图
12
武汉理工大学《计算机控制技术》课程设计说明书
T=4s时仿真图形如图5-7所示

图5-7 仿真图
T=5s时仿真图形如图5-8所示

图5-8 仿真图 13
武汉理工大学《计算机控制技术》课程设计说明书
心得体会
本次计算机课程设计我做的是温度控制系统,是通过计算机,单片机,一些控制算法,等等的对电炉的温度进行控制,使得电炉的温度达到任何我们想要达到的温度。
温度的控制是一个很复杂的过程,一开始感觉根本无从下手,不知道究竟是如何实现温度控制的。于是开始到处查资料,从网上搜索,到图书馆借阅相关的书籍,同学之间,同组的同学之间相互讨论,慢慢的深入,慢慢的开始有了一点的认识,有了一定的了解。直到那个时候才发现实现温度控制并不是我们想象的那么简单,其中包括一些算法,许多检测,判断,传感器的信号转换等很多环节,不过每部都是我们已经学过的,我们可以用自己学过的知识解决。
我们这组的被控对象是带有滞后的一阶系统,仿真过程中需要借助一定的程序将系统离散化,通过将信号偏差与给定的偏差比较,选择究竟是用PID控制还是用PD控制,当偏差较大的时候选择PD控制,因为积分环节会增大系统的超调,并且产生长时间的波动。特别对于温度,成分等变化缓慢的过程,这一现象更为严重,会对系统的稳定性产生很大的影响,这不是我们所期望的,我们所需要的是超调小,波动小的系统,所以此时就要去掉积分环节。当偏差小的时候可以采用PID控制算法。
通过传感器将温度信号转化成电压信号,电压信号被计算机采集,进行比较已经控制算法的选择,计算机将控制结果送给可控硅控制器,可控硅控制器通过调节加在热阻丝两端的电压来改变电流,从而调节电炉的温度。
本次课程设计我学到了很多知识,让我知道了,如何运用我们学过的知识去解决生活中一些问题,使得一些温度控制等等的不需要人为的参与,由计算机自动控制,这对我们的生活带来了很大的便利。
14
武汉理工大学《计算机控制技术》课程设计说明书
参考文献
[1]李建忠.单片机原理及应用.西安:西安电子

科技大学出版社
[2]潘新民.王燕芳.微型计算机控制技术.北京:高等教育出版社
[3]何立民.单片机应用系统设计.北京:

北京航空航天大学出版社
[4]韩志军,沈晋源,王振波.单片机应用系统设计.北京:机械工业出版社
[5]周航慈.单片机程序设计基础.北京:北京航空航天大学出版社,2000.
15
武汉理工大学《计算机控制技术》课程设计说明书
程序清单
积分分离PID控制算法子程序:
START:MOV 68H,KP ;分别将KP ,TI ,TD, T,β送入指定的存
MOV 54H,TI MOV 55H,TD MOV 56H,T MOV 57H,β
MOV A,68H MOV B,56H MUL AB MOV B,54H DIV AB MOV 69H,A
MOV A,68H MOV B,55H MUL AB MOV B,56H DIV AB MOV 6AH,A
LOOP0: MOV DPTR #7FF0H MOV @DPTR,A LOOP1 JB P3.3,LOOP1 MOVX A,@DPTR MOV 5CH,A MOV DPTR,#7FF1H
储单元
;计算KI=KP*T/TI ;计算KD=KP*TD/T ;读取预定温度值,送ADC0809的IN0口地
址
;启动A/D转换 ;等待转换数据
;读取ADC0809的IN0口转换后的数据 ;将预定值数据放入指定的存储单元
ADC0809的IN1口地
址
16
;读取采样温度值,送
武汉理工大学《计算机控制技术》课程设计说明书
MOVX @DPTR,A ;启动A/D转换
LOOP2: JB P3.3,LOOP2 ;等待转换数据
MOVX A,@DPTR ;读取ADC0809的IN1口转换后的数据 MOV 49H,A ;将采样值数据放入指定的存储单元 MOV A,5CH ;计算ei,先取温度给定值
CLR C
SUBB A,50H
JNC AA0
CPL A
ADD A,#01H
AA0: MOV R0,57H
SUBB A,57H
JNC AA1
SJMP AA2
AA1: LCALL PD
AA2: LCALL PID
MOV A,7CH
MOV DPTR,#7FF2H
MOVX @DPTR,A
INC DPTR
MOVX @DPTR,A
LCALL DELAY
SJMP LOOP0
DELAY PROC NEAR
DL0: MOV R6,#FFH
DL1: MOV R7,#FFH
DL2: MOV R5,#FFH
DLS: DJNZ R5,DLS
;温度给定值-采样值 ;判断ei的正负,如果为正,跳至AA0 ;ei为负,下两条指令求补 ;|ei|-β ;|ei|>β跳至AA1 ;|ei|<β跳至AA2 ;调用PD算法 ;调用PID算法 ;将△Ui通过DAC0832输出 ;调用延时子程序,等待下一次采样计算;进入下一次控制计算 17
武汉理工大学《计算机控制技术》课程设计说明书
DJNZ R7,DL2 DJNZ R6 DL1 RET
DELAY ENDP
PID PROC NEAR
PID:MOV A,5CH CLR C
SUBB A,50H JNC PID1 CPL A ADD A,#01H
SETB 30H SJMP PID2
PID1:CLR 30H PID2:MOV 6BH,A MOV R1,6BH MOV C,30H MOV 20H,C
MOV R2,6CH MOV C,31H MOV 21H,C
LCALL DJF MOV 6EH,R3 MOV C,22H MOV 33H,C
MOV R1,6CH MOV C,31H MOV 20H,C
;计算ei,先取温度给定值
;温度给定值-温度检测值
;判断ei正负,如果为正,跳至PID1 ;ei为负,下两条指令求补 ;ei为负,符号位置1 ;ei为正,符号位置0 ;ei值存放在6BH单位元中
;计算ei-ei-1,先将ei值,送R1 ;将ei的符号位值送20H位 ;将ei-1值送R2
;将 ei-1的符号位值送21H位 ;调用单字节带符号的减法子程序 ;将差值ei-ei-1送6EH单元 ;将差值ei-ei-1的符号位送33H位 ;计算ei-1-ei-2,先将ei-1值送R1 ;将ei-1符号位送20H位 18
武汉理工大学《计算机控制技术》课程设计说明书
MOV R2,6DH ;将ei-2的值送R2
MOV C,32H ;将 ei-2的符号位值送21H位
MOV 21H,C
LCALL DJF ;调用单字节带符号的减法子程序 MOV 6FH,R3 ;将差值ei-1-ei-2送6FH单元
MOV C,22H ;将差值ei-1-ei-2的符号位送34H位
MOV 34H,C
MOV R1,6EH
MOV C,33H
MOV 20H,C
MOV R2,6FH
MOV C,34H
MOV 21H,C
LCALL DJF
MOV 70H,R3
MOV C,22H
MOV 35H,C
MOV A,68H
MOV B,6EH
MUL AB
MOV 71H,B
MOV 72H.A
MOV A,69H
MOV B,6BH
MUL AB
MOV 73H,B ;计算(ei-ei-1)-(ei-1-ei-2),将ei-ei-1值送R1 ;将ei-ei-1符号位送20H位 ;将ei-1-ei-2值送R2 ;将ei-1-ei-2符号位送21H位 ;调用单字节带符号的减法子程序 ;将差值(ei-ei-1)-(ei-1-ei-2)送70H单元 ;将差值(ei-ei-1)-(ei-1-ei-2)的符号位值送35H位 ;计算Kp*(ei-ei-1),将Kp值送A ;将ei-ei-1值送B ;两数相乘 ;Kp*(ei-ei-1)值存71H,72H单元 ;计算KI*ei,将KI值送A ;将ei值送B ;两数相乘 ;KI*ei值存73H,74H单元
19
武汉理工大学《计算机控制技术》课程设计说明书
MOV 74H,A
MOV A,6AH ;计算KD*[(ei-ei-1)-(ei-1-ei-2)],将KD送A
MOV B,70H ;将(ei-ei-1)-(ei-1-ei-2)值送B MUL AB ;两数相乘
MOV 75H,B ;KD*[(ei-ei-1)-(ei-1-ei-2)]值存
MOV 76H,A
MOV R1,71H MOV R2,72H
MOV C,33H MOV 23H,C
MOV R3,73H MOV R4,74H
MOV C,30H MOV 24H,C
LCALL SJF MOV 77H,R5 MOV 78H,R6
MOV C,25H MOV 36H,C
MOV R1,77H MOV R2,78H
MOV C,36H 75H,76H单元
;计算Kp*(ei-ei-1)+KI*ei,将Kp*
(ei-ei-1)值送R1,R2
;将Kp*(ei-ei-1)的符号位值送23H
位
;将KI*ei值送R3,R4 ;将KI*ei值的符号位懂24H位 ;调用双字节带符号加法子程序 ;将Kp*(ei-ei-1)+KI*ei值送77H,78H ;将Kp*(ei-ei-1)+KI*ei值的符号位送
36H位
;计算△Ui,将将Kp*(ei-ei-1)+KI*ei
值送R1,R2
;将Kp*(ei-ei-1)+KI*ei值的符号位送
23H位
20
武汉理工大学《计算机控制技术》课程设计说明书
MOV 23H,C
MOV R3,75H ;将KD*[(ei-ei-1)-(ei-1-ei-2)]的值
送R3,R4
MOV R4,76H
MOV C,35H ;将KD*[(ei-ei-1)-(ei-1-ei-2)]的符
MOV 24H,C
LCALL SJF MOV 79H,R5 MOV 7AH,R6
MOV C,25H MOV 37H,C
MOV R1,7DH MOV R2,7EH
CLR 23H MOV R3,79H MOV R4,7AH
MOV C,37H MOV 24H,C
LCALL SJF JNB 25H,PID3 MOV 7BH,#00H MOV 7CH,#00H SJMP PID4
PID3:MOV 7BH,R5 MOV 7CH,R6
PID4:MOV 6DH,6CH MOV 6CH,6BH MOV 7DH,7BH 号位送23H位
;调用双字节带符号加法子程序 ;将△Ui值送79H,7AH ;将△Ui值的符号位送37H ;计算Ui,将Ui-1值送R1,R2 ;Ui-1值的符号位值恒为0 ;将△Ui值送R3,R4 ;将△Ui值的符号位送24H ;调用双字节带符号加法子程序 ;判断计算结果是否为负 ;如果是负数,则输出电压为0 ;否则,将计算得到的Ui值置7BH,7CH
;数据迭代,ei-1值送ei-2存储单元
;ei值送ei-1存储单元 ;Ui值送Ui-1存储单元
21
武汉理工大学《计算机控制技术》课程设计说明书
MOV 7EH,7CH RET PID ENDP
PD PROC NEAR
PD:MOV A,5CH ;计算ei,先取温度给定值
CLR C
SUBB A,50H JNC PD1 CPL A ADD A,#01H
SETB 30H SJMP PD2
PD1:CLR 30H PD2:MOV 6BH,A MOV R1,6BH MOV C,30H MOV 20H,C;
MOV R2,6CH MOV C,31H MOV 21H,C
LCALL DJF MOV 6EH,R3 MOV C,22H MOV 33H,C
MOV R1,6CH MOV C,31H MOV 20H,C
MOV R2,6DH ;温度给定值-温度检测值
;判断ei正负,如果为正,跳至PID1 ;ei为负,下两条指令求补 ;ei为负,符号位置1 ;ei为正,符号位置0 ;ei值存放在6BH单位元中
;计算ei-ei-1,先将ei值,送R1 ;将ei的符号位值送20H位 ;将ei-1值送R2
;将 ei-1的符号位值送21H位 ;调用单字节带符号的减法子程序 ;将差值ei-ei-1送6EH单元 ;将差值ei-ei-1的符号位送33H位 ;计算ei-1-ei-2,先将ei-1值送R1 ;将ei-1符号位送20H位 ;将ei-2的值送R2
22
武汉理工大学《计算机控制技术》课程设计说明书
MOV C,32H ;将 ei-2的符号位值送21H位 MOV 21H,C
LCALL DJF ;调用单字节带符号的减法子程序 MOV 6FH,R3 ;将差值ei-1-ei-2送6FH单元 MOV C,22H ;将差值ei-1-ei-2的符号位送34H位 MOV 34H,C
MOV R1,6EH MOV C,33H MOV 20H,C
MOV R2,6FH MOV C,34H MOV 21H,C
LCALL DJF MOV 70H,R3 MOV C,22H MOV 35H,C
MOV A,68H MOV B,6EH MUL AB MOV 71H,B MOV 72H.A
MOV A,6AH MOV B,70H MUL AB MOV 75H,B ;计算(ei-ei-1)-(ei-1-ei-2),将ei-ei-1
值送R1
;将ei-ei-1符号位送20H位 ;将ei-1-ei-2值送R2 ;将ei-1-ei-2符号位送21H位 ;调用单字节带符号的减法子程序 ;将差值(ei-ei-1)-(ei-1-ei-2)送70H
单元
;将差值(ei-ei-1)-(ei-1-ei-2)的符
号位值送35H位
;计算Kp*(ei-ei-1),将Kp值送A ;将ei-ei-1值送B ;两数相乘
;Kp*(ei-ei-1)值存71H,72H单元 ;计算KD*[(ei-ei-1)-(ei-1-ei-2)],将KD
送A
;将(ei-ei-1)-(ei-1-ei-2)值送B ;两数相乘
;KD*[(ei-ei-1)-(ei-1-ei-2)]值存75H,
23
武汉理工大学《计算机控制技术》课程设计说明书
76H单元 MOV 76H,A
MOV R1,71H ;计算Kp*(ei-ei-1)+KI*ei,将Kp*(ei-ei-1)
值送R1,R2
MOV R2,72H
MOV C,33H ;将Kp*(ei-ei-1)的符号位值送23H位 MOV 23H,C
MOV R3,75H MOV R4,76H
MOV C,35H MOV 24H,C
LCALL SJF MOV 79H,R5 MOV 7AH,R6
MOV C,25H MOV 37H,C
MOV R1,7DH MOV R2,7EH
CLR 23H MOV R3,79H MOV R4,7AH
MOV C,37H MOV 24H,C
LCALL SJF JNB 25H,PD3 MOV 7BH,#00H MOV 7CH,#00H
;将KD*[(ei-ei-1)-(ei-1-ei-2)]值送R3,
R4
;将KD*[(ei-ei-1)-(ei-1-ei-2)]值的
符号位送24H位
;调用双字节带符号加法子程序 ;将△Ui值送79H,7AH ;将△Ui值的符号位送37H ;计算Ui,将Ui-1值送R1,R2 ;Ui-1值的符号位值恒为0 ;将△Ui值送R3,R4 ;将△Ui值的符号位送24H ;调用双字节带符号加法子程序 ;判断计算结果是否为负 ;如果是负数,则输出电压为0 24
武汉理工大学《计算机控制技术》课程设计说明书
SJMP PID4
PD3:MOV 7BH,R5 ;否则,将计算得到的Ui值置7BH,7CH
MOV 7CH,R6
PD4:MOV 6DH,6CH ;数据迭代,ei-1值送ei-2存储单元
MOV 6CH,6BH ;ei值送ei-1存储单元
MOV 7DH,7BH ;Ui值送Ui-1存储单元
MOV 7EH,7CH
RET
PD ENDP
25
二 : 电饭锅温度控制系统
电饭锅温度控制系统设计
姬红富 邹清洋
(大庆师范学院)
摘要: 通过介绍电饭煲温度控制系统特征,建立其数学模型,分析受控对象特点,指出了传统电饭煲在温度控制方面的不足;从营养学角度设计了电饭煲的期望升温曲线,并对电饭煲温度控制系统的硬件电路进行了设计;在控制方法里引入了模型偏差补偿的思想,阐述了模型偏差补偿的算法原理和特点,并以电饭煲为被控对象进行了 Matlab仿真。(www.61k.com)仿真结果表明系统误差完全在可以接受的范围内,证明模型偏差补偿的方法在电饭煲温控系统中具有精度高、 可靠性强等优点。
关键词: 期望曲线;加热底盘;电饭煲内胆;模型偏差补偿
Research on the temperature control system of electric cooker
Ji Hongfu Zou Qingyang
(Daqing Normal University)
Abstract: The features of temperature control system in electric cooker are introduced, and the math model of it is built . The draw backs of temperature control in the conventional electric cooker are pointed out . In view of nutrition, the expected calefactive curve is suggested and the hardware circuit of temperature control system is designed . A control scheme of model deviation compensation is proposed . And, the principles and characters of this method are explained . Through the result of simulation in Matlab while taking electric cooker as controlled object , the method of model deviation compensation is p roved to be reliable and precise in the application of the electric cooker’ s temperature control system. And the sys tem errors are acceptable .
Key words: expected curve; heat chassis; gallbladder of electric cooker ; model deviation
compensation
引言:电饭锅是一种应用极为广泛的家用电器,它为人们的日常生活提供了便捷的服务。传统的电饭锅在温度控制方面采用了简单的双金属片检测电路,当温度超过设定值时加热电路断开,温度下降后加热电路重新闭合,这样造成底盘加热升温变化波动较大,且加热底盘、 锅内胆以及温度检测电路的惯性特性造成了温度控制反应的滞后,以致加热底盘的温度容易出现比较大的超调量,对电路中元器件的可靠性和寿命造成了负面影响[ 1 ]。本文从倡导食品营养科学的角度引入期望曲线,运用模型偏差补偿控制方法[ 2 - 5 ],消除了加热底盘升温的异常波动和超调量,保证了元器件的稳定性和可靠性,从而提高了能源的利用率和系统的控制精度。本文通过用 Matlab对温度控制系统进行仿真,证明了模型偏差补偿是一种合适、可靠、性价比高的控制方法。
1.电饭锅温度控制系统
1.1 电饭锅系统的期望升温曲线
以电饭锅煮饭为例,从食品营养的角度来分析,电饭锅煮饭过程可分为吸水、 加热、 沸腾、 焖饭、 膨胀和保温六个阶段。
根据对 900W 输入功率的电饭煲实际参数的测量,综合各种期望指标,绘制出如图 1所示
的期望升温曲线。各阶段持续时间如表 1所示。
图1 电饭锅升温曲线 表1 各阶段持续时间表
温度控制系统 电饭锅温度控制系统
如图 1所示,六个阶段依次为:
1) 吸水阶段:t0~t2 ,持续 8min,作用是在一定温度下进行吸水,大米含水率从大约15%上升到25%以上,使后面的大米加热更均匀;这个阶段本文设计温度上限取 52~55℃。[www.61k.com]
2) 加热阶段:t1~t2,对电饭煲进行持续的加热,使水温不断升高,温度均匀上升,大米继续吸收水分并开始淀粉α化。从营养学角度考虑,加热阶段的时间对米饭的质量有极大影响,综合米饭α化程度、 还原糖量、 硬度、 粘结力和人们品尝后的味道评价等指标,本文设计加热时间为10min。
3) 沸腾阶段:t2~t3 ,首先在100℃左右维持一段时间,使大米深度吸水,并在较高的温度作用下促进淀粉的α化。本文设计温度将升高到125℃。
4) 焖饭阶段:t3~t4,持续 10~12m in,这个阶段的作用是使能量透入到米饭的芯部,使米粒充分受热,并蒸发掉多余的水分。营养学及现有经验表明:焖饭阶段的温度保持在105~110℃,且焖饭之后的米饭含水率若在 65%~70% 左右时食用口感最好。
5) 膨胀阶段:t4~t5,此阶段的作用是使米饭松化。这个过程在焖饭温度下降到一定程度时 (本文设计取值 103℃)马上进行加热。这次加热会使米饭的水分进一步蒸发,米饭进一步变得松软;当温度升高到一定程度 (本文设计取值 113℃)停止加热,米饭转而进一步放热;处于这种放热状态的米饭,就可以变得充分松软。
6) 保温阶段:t5以后,在电饭煲的温度下降到 70℃时开始,根据需要,若使米饭维持在 70℃恒温,能保证米饭最优质量的存放时间不低于 8h 。
综上所述,本文设计的整个煮饭过程历时大约 2580s,合 43m in 。
1 .2 控制对象数学建模
本文的设计中,温度控制器可以输出连续的控制信号,对加热底盘的输出功率进行控制,进而控制盛放待加热米饭的锅内胆的加热;而温度反馈检测电路及时将锅内胆的温度数据返回给温度控制器,以便及时做出调整,选择最合适的加热方式。电饭锅系统模型如图 2所示。
图2 电饭锅温度控制系统的模型
在数学建模中,电饭煲的系统模型可近似认为是惯性系统,通过对已有电热系统模型以及功率消耗值的计算,电饭煲的核心部件之一加热底盘的数学模型的传递函数为
电饭煲内胆在装入 2L大米和相应的煮饭水后,数学模型的传递函数为
控制系统温度传感器数学模型的传递函数为
1.3 电饭煲硬件系统设计
控制系统由电源稳压电路、过零检测电路、键盘输入电路、蜂鸣报警电路、单片机、L ED显示、功率驱动电路,信号检测电路以及锅底温度传感器等组成,如图 3所示。
温度控制系统 电饭锅温度控制系统
图3 电饭煲硬件系统框图
电源稳压电路由变压器、 整流电路和稳压电路组成,向单片机及其他电路供电;过零检测电路用于检测电源电压波形的过零点,以控制后面功率驱动电路中的晶闸管电路;键盘输入电路由一组按键和一组电阻构成,在实际应用中以不同的按键代表不同的煮饭功能以满足现实需要;蜂鸣报警电路的按键代表不同的煮饭功能以满足现实需要;蜂鸣报警电路由晶体管、 蜂鸣器和电阻组成,用以提示煮饭时间到或扩展其他功能;单片机是电饭煲温度控制系统的核心器件,本设计选用在实际生产中应用较广泛的 Motorola公司的MC68HC05P6; L ED显示用于显示时间和不同的煮饭功能;功率驱动电路采用晶闸管驱动方式;信号检测电路及锅底温度传感器用于及时检测出锅底的温度,反馈给单片机以调整温度控制信号。[www.61k.com)
2.模型偏差补偿及 P ID参数的选择
本设计中的 PID参数确定采用模型偏差补偿的思路。模型偏差补偿控制的本质是:把未建模动态对状态误差的等效影响正确估计出来,并加以补偿;它是一种能通过轨迹跟踪误差的测量信息估计建模误差的等效量,并加以正确补偿的一类控制。未建模动态对跟踪误差有综合影响,如果能从跟踪误差的信息中将其中由未建模动态造成的那部分正确分离 (估计) 出来,并在控制量中引入能抵消该误差的补偿控制量,这无疑是最直接也是最有效的办法。当然,在跟踪过程中未建模动态对跟踪误差的等效 (综合) 影响通常是时变的,但相对于采样周期 (控制周期) 则是慢时变的,不断产生新的跟踪误差,补偿过程也将不断进行。
对于动力学模型具有如下形式的研究对象:
其中, f是分段连续的时变非线性函数; w是分段连续的外界干扰; b是己知常数。
此时模型偏差补偿控制规律具有如下形式:
如果二阶系统可表示为
选定滑线为
基本模型偏差补偿控制方案去掉前馈,得
此时模型偏差补偿的控制算法具有PID控制算法的结构形式,并且通过上式可以确定PID
控制的参数:P参数等于KPc+Ki;I参数等于Kic;D参数等于KP。
3.电饭锅PID控制方法的仿真
在 Matlab中进行仿真,首先在 Simulink工具箱中建立系统框图,编写期望曲线的函数程序,调用 MatlabFunction模块产生期望曲线。系统结构如图 4所示。
温度控制系统 电饭锅温度控制系统
图4 电饭锅温度控制系统PID仿真框图
系统 T取100m s,仿真步长设置为100m s, c取 10,即 P参数为200, I参数为1000, D参数为10时,将图 1所示的期望信号输至带PID算法的温度控制系统后,系统响应曲线如图 5所示。(www.61k.com]
图5 PID仿真曲线的输出
结果显示, PI D控制曲线对期望曲线的跟踪比较精确,能令人满意地跟踪期望曲线的各个阶段,跟踪过程误差如图 6所示。由模型偏差补偿原理可知,追踪曲线和期望曲线的误差是由期望曲线各拐点处曲线斜率突变造成的; Matlab的求误差命令显示此时最大误差是 0.2632℃,完全符合电饭煲实际需求。在现实应用中,考虑到电饭煲温度控制系统的实际需求,建议 C取 1~10,且鉴于工程经验, PI D参数取值时通常在参数 KP前乘以系数 0.2~0.5,在参数 Ki前乘以系数 0.05~0.1 。
图6 追踪曲线与期望曲线的误差图
4 结论
在系统仿真中,模型偏差补偿的控制方法使得电饭锅温度控制系统追踪曲线与期望曲线吻合度较高,系统超调量可近似忽略,完全能达到预期要求;在实际应用中,采用模型偏差补偿的控制方法后电饭锅能提高能源利用率,减少能源损耗,提高控制精度。因此,模型偏差补偿的方法是一种有效、适用的电饭锅温度控制方法。
温度控制系统 电饭锅温度控制系统
[参考文献]
[1] 胡寿松.自动控制原理[M].北京:科技出版社,2007.
[2] 王建辉.自动控制原理(第4版). 北京:机械工业出版社,1993.
[3] 刘舒.自动控制原理考试参考书.中国人民公安大学出版社,2009.
[4] 陈卿,侯薇.家电控制与检测用集成电路[M].北京:中国计量出版社,2005.
三 : 34基于铂电阻的单片机温度控制系统
河北
交流
基于铂电阻的单片机温度控制系统
山西中北大学机电工程学院
引言
随着单片机技术的飞速发展,通过单片机对被控对象进行控制日益成为今后自动控制领域的一个重要发展方向,电流、电压、温度、压力、流量、流速和开关量都是常用的主要被控参数。温度控制是控制系统中最为常见的控制类型之一。在温度控制系统中温度传感器的使用也是相当重要的,铂电阻温度传感技术为温度传感领域的发展带来了新的契机。它利用白金的电阻阻值在一定的温度范围内随温度呈基本线性变化的原理进行温度的测量,可用于测量-200℃到800℃范围内的温度,具有稳定性好、测量范围宽、精确度高、重复性好等诸多技术优势。由于它的良好电输出特性,铂电阻元件可为显示仪、记录仪、控制器、扫描器、数据记录仪以及计算机提供精确的输入值。用微型瓷骨架绕上铂电阻丝而制成的感温元件,可以做得相当小(最小的外地人径可做到φ1.6mm),因此可制成各种微型温度传感器探头,也可以制成各种端面铂电阻,用以测量各种固体
牟春阳李世中
表面的温度,如配以不锈钢保护管则可测量液体,蒸汽和各种气体的温度。
从17世纪初人们就开始利用温度进行测量。20世纪初期,铂电阻温度传感技术研制成功。20世纪90年代中期,随着薄膜技术的引入,世界上的温度传感器主流生产厂家开发出了薄膜铂电阻产品。
1电路设计的整体思路本设计使用AT89C52单片机作为主控芯片,采用铂热电阻进行温度系统调节。硬件电路部分包括微处理器模块、温度控制模块、A/D转换模块及显示模块和键盘部分,在温度测量系统中,用铂电阻传感器进行温度测量。铂电阻具有非线性的缺点,因此在信号调理电路的基础上加了负反馈非线性校正网络。调理电路的输出电压经ADC0808转换后送入单片机AT89C52;对采样数据进行滤波及标度变换处理后,由数码管显示。4位输入的设定值则由独立式键盘电路进行调整,设定值送入单片机后由另一组数码管显示。整体电路框图如图1所示。
图2模糊控制基本原理
图
图1整体电路框图2硬件电路设计2.1模糊控制
温度控制系统具有非线性、时滞性的缺点。仅仅依靠过去的控制方式很难达到很好的控制效果,成本也较高。因此采用智能控制中的模糊控制可以有效解决温度控制系统的这些问题。本系统的模糊控制也是由单片机的程序来实现。模糊控制的整个过程为:首先由铂电阻传感器获取实际温度,然后用实际温度与需要的温度进行比较,求出误差和变化率,记过量化和限幅子程序的处理,查询相关文献得到控制量,然后由相关程序发出控制信号来控制加热片及风扇工作。模糊控制基本原理图如图2所示:
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
参考文献:
[1]邸长明,张科.BOPP薄膜分切收卷
里紧外松现象的解决办法[J].塑料包装,1999,9(3):15-17.
[2]吴贵华,张松岩,余青.草纤维粘胶薄膜分切机的设计[J].黑龙江造纸,1995,
2:015.
[3]李百刚.分切机收卷轴摩擦力矩的研究[D].西安理工大学,2008.
[4]曹毅,周会成,唐小琦.双轴同步控制技术的研究[J].制造技术与机床,2008(2):65-68.
[5]朱小兵.高速数字分切机的现状及发展前景[J].塑料包装,2002,3:4043.
[6]金瑞明.高速盘纸分切机的结构与设计[J].中国造纸,1992,3:006.
2015年第1期
57
交流
河北
此装置的核心部分是模糊控制器(图中虚线部分),模糊控制器的输入变量和输出变量的确定:通常将模糊控制器输入变量的个数称为模糊控制器的维数。一般认为维数越高得到的效果越好,但是实现起来就越不容易,会遇到各种各图4铂电阻测温调理电路样问题。现在常见的是二维模糊控2.3A/D接口电路
制器,结构图如图3所示。这种控当铂电阻传感器置于所要检制器以误差和变化率为输入变量,测温度的环境时,调理电路将根据以控制量的变化为输出变量。
阻值输出相应的电压值。将输出电压经通过ADC0808进行模数转换为等价的数字信号。A/D转换接口电路如图5所示。
图3二维模糊控制器结构图2.2铂电阻测温调理电路本系统采用恒流工作调理电路,铂电阻选用标称值为100Ω的Rt100作为温度传感器,其性能稳图5AID转换接口电路
定,能够在低至零下约260摄氏度2.4键盘输入电路
至630摄氏度的温度内运行,可作在本系统中,采用独立式键为温度标准,温度范围比较广。此盘。从键盘输入温度设定值与铂电电路运放采用型号为OP07C的低阻传感器所检测的实际温度值进漂移运放,由于在电路中铂电阻上行比较,求出系统的误差与误差变有电流流过,当铂电阻处于环境温化率,供以后的模糊控制子程序使度为0摄氏度时,此电阻上有压用。其中第1、2号键选用双稳态开降,这就是铂电阻的片偏置电压,关,为后续键盘处理子程序的分支是运放A1输出电压的一部分,这子程序提供便利。第3、4号键选用一部分电压使恒流工作调理电路按钮开关。在编写键盘程序时得注的输出实际温度不为0,所以需要意以下几个问题:
通过各种途径对这个电压调零。图(1)怎样能够尽量减少开关的中电阻R3作用就是调零,由于铂使用寿命,以便提高其使用时间。
电阻有非线性的缺点,在0Ω到(2)怎样更快更方便地给出设100Ω内非线性误差为0.4%,这个定值,以便与实际值进行快速比较。
误差不是很大,对电路不会有多大(3)怎样方便总体程序整体运行。的影响,但是由于在软件编制过程为此,采用4个键来搭建键盘中,对标度变换子程序中变换系数电路,如图6所示。
作了近似,使得这个误差扩大接近0.8%,这样的误差对电路的影响很大,不能被忽略,所以加进了线性化电路,图中运放A3及电阻R1、R4和R6一同构成了负反馈非线性校正网络。R5用于调整运放A2的增益。图6键盘输入电路
58
2015年第1期
转入控制处理子程序运行由第一个键来判断。在第一个键按下的前提下第二个键才开始起作用,用第二个键来判断是十位进行加减操作,还是个位进行加减操作。第三个键为减1操作,第四个键为加1操作。为了进一步解决上面提出的两个问题,将个位与十位的设定值均设置为5,如果加1操作结果等于11,给加1单元重赋5,如果减1操作结果等于0FFH,给减1单元重赋5。这样,考虑最坏情况,即用键盘设置离初始值最远的值;第一个键和第二个键的加入,也充分考虑了总程序的整体调度。
2.5显示电路
显示电路采用两个4位LED显示数码管,共阴极接法,P1接口
最多可连接8个LED显示器。为了提高其显示亮度,通常加74LS05进行段控输出驱动,与七段数码管的段码驱动输入端相连,由于位控线的驱动电流比较大,八段全亮需要40~60mA,所以用三极管9012提高驱动能力,其集电极接七段数码管的位码驱动输入端,三极管的发射极接地,将AT89C52的P3.0、P3.1、P3.2口分别与一个2KΩ的电阻相连,接到三极管的基极,用于驱动采样值显示数码管,将AT89C52的P2.0、P2.1和P2.2口分别与一个2KΩ的电阻相连,接到三极管的基极,用于驱动设定值显示数码管。
2.6温度控制电路
本文是单片机通过利用PWM波来控制加热的温控电路,其电路图如图7所示,由两级三极管放大电路组成,第一级放大采9014三极管,其放大倍数可达1000以上,而第二级采用大功率的达林顿管TIP122,当P3.4输出低电平时,三极管导通,控制加热
片进行加热
。
河北
交流
制规则,得出占空比控制变化量U,采用不同的定时来改变继电器的通断,从而完成对加热和风扇的控制。铂电阻测控系统主程序流程图如图8所示。
4结论
在自动控制领域,对温度控制的要求越来越高,由于温度控制具有非线性、时滞性及不确定性,因此往往很难找到精确的方案去控制。本课题设计就是运用模糊控制采用铂电阻温度传感器通过单片
图7温控电路3系统的软件设计
打开单片机电源开关让单片机上电复位。启动A/D转换,将环境温度(模拟量)转换成数字量,为下一步的数字显示做好准备;接着把单片机的各种参数进行初始化,调用数据采集子程序,并且将转换后的数据进行滤波;再将滤波后的数据经温度标度变换后送显示数码管进行显示,我们可以从数码管中看出环境的温度,通过键盘我们可以改变设定值,此时,根据键盘扫描判断S1键是否按下,S1键按下则会转入键盘处理程序,没有则调用误差e处理子程序和误差变化率ec处理子程序,将误差e和误差变化率ec进行量化,通过查模糊控
图8铂电阻测控系统的
主程序流程图
机AT89C52化工合成装置进行控制,提高了准确性和工作效率,体现了模糊控制在温度控制上的先进性和实用性。
参考文献:
[1]唐洪富,张兴波.基于STC系列单
片机的智能温度控制器设计[J].电子技术应用,2013,39(5).
[2]方平,张晓力.烟叶烤房湿湿度蜀劲槐利仪的设针[J].电子技术应用,2004,30(7).
[3]邓力.PROTEUS和51单片机的电路仿真[J].中国科技信息,2006,(8):45-46.
[4]K.Tanaka,M.Sugeno.Stability
AnalysisandResignofFuzzyControlSystems.FuzzySetsandSystems,1992,45.
[5]张永明,关山,吴瑞生等.智能环境温度监控系统[J].电子技术应用,1999,(3):1-8.
[6]李丹.模糊控制在温度控制系统中的应用与发展[J].黄金学报,2000,2(4):68-71.
[7]薛朝妹.温度模糊控制器的设计[J].现代电子技术,1999,(10):15-1
8.
欢迎订阅2015年度《农业装备技术》杂志
欢迎订阅
欢迎投稿
欢迎刊登广告
杂志由江苏大学农业装备工程研《农业装备技术》
究院主办,是经国家科技部、国家新闻出版总署批准公开发行的科技期刊,列入CNKI中国知识基础设施工程,为中国学术期刊综合评价数据库统计源期刊、中国核心期刊(遴选)数据库全文收录期刊、中国期刊全文数据库全文收录期刊、中国学术期刊综合评价数据库全文收录期刊。
《农业装备技术》杂志面向新世纪农业现代化发展的要求,宣传党和国家有关方针政策,为提高我国现代化农业装备水平,促进农业工程技术与生物技术的协调发展及其各相关因素的优化结合,加强农业的物质技术基础,开展现代农业装备及相关技术的研究与交流,介绍推广先进实用的科技措施和生产技术,交流国内外先进技术、先进装备、科研新成果及发展动态,促
进农机企业及产品的宣传与交流,传授科技致富经验,传播科技知识,促进农业装备技术水平的提高。
《农业装备技术》主要栏目:装备工程、现代农业、设计与工艺、农业开发、机手之友、热点问题、适用技术、四新集萃、展望预测、信息窗等。
《农业装备技术》杂志为双月刊,大16开64页,每期定价8.00元,全年48元。由本杂志社发行部自办发行,订款可通过邮局或银行直接汇款到《农业装备技术》杂志社订阅。
地址:江苏省镇江市学府路71号邮编:212003电话:0511-84403490开户银行:江苏省镇江市农行城南分理处帐号:319001040007506E-mail:nyzbjs@sina.com
2015年第1期
59
本文标题:温度控制系统-温度控制系统设计61阅读| 精彩专题| 最新文章| 热门文章| 苏ICP备13036349号-1